微分-(下) 多元函数微分
多元函数
1. 定义:形如 y=f(x1, x2, x3, ..., xn) 的函数
2. 两点 x(x1, x2), z(z1, z2) 的距离d = | z-x | = sqrt( (z1-x1)**2 + (z2-x2)**2 + ... + (zn-xn)**2 )
3. 如果 x趋于a时,f(x)趋于A,称A为f(x)在x趋于a时的极限。如果又有x=a时f(x)=A,则f(x)在a点连续。
4. f(x,y) = (y*x**2) / (x**4 + y**2), 当y=kx时在x趋于0时极限为0且连续;当y=kx**2时在x趋于0时极限不存在,不连续。
偏导数
- 定义:对多元函数 f(x, y, z, …),如果只有自变量x变化,而其他自变量y,z等看做常量,这是f(x,y,z,…)就是一元函数,f对x的导数,就称为多元函数f对x的偏导数。
- 连续性:多元函数在某一点的连续性 与 函数在某一点的偏导数是否存在和函数值是否等于极限值 无关。
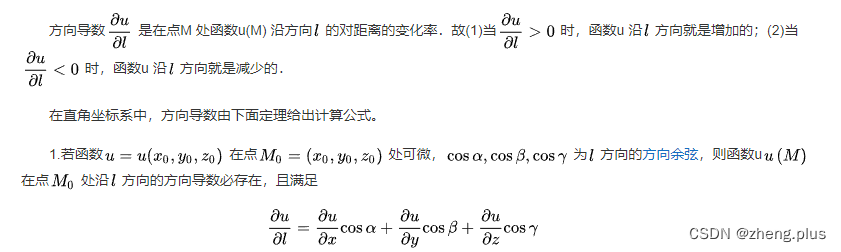
方向导数
- 偏导数反映的是函数沿坐标轴方向的变化率
- 方向导数讨论函数沿指定方向如
v
=
(
c
o
s
θ
x
,
c
o
s
θ
y
,
c
o
s
θ
z
)
v = (cos\theta x, cos\theta y, cos\theta z)
v=(cosθx,cosθy,cosθz)的变化率
可微
可微 <==> 各个方向偏导存在且连续
梯度
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img.cn/a625703da61c425)(./02differential.assets/image-2022120420575704d0b1.png7fedfaf1a[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-rj5I3Kcz-1670161814126)(./02differential.assets/image-20221204214611543.png)]](https://img-blog.csdnimg.cn/b6228167b5cf47218979ad6920ccb9f0.png)
多元复合函数的求导法则 – 链式法则
- 一元函数:(f(g))’ = f’(g) * g’
- 多元复合函数:
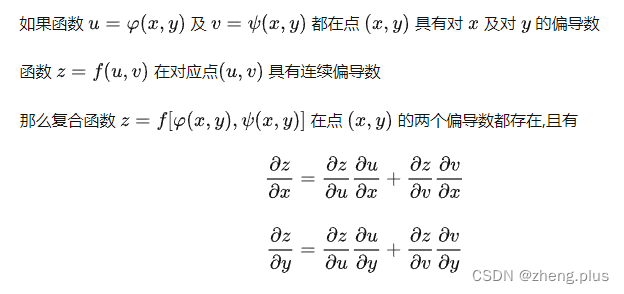
Jacobian矩阵
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-iNEXPWf5-1670164330450)(./02differential.assets/image-20221204220010698.png)]](https://img-blog.csdnimg.cn/611dcdd53c32482fbc43fd6430e33837.png)
Hessian矩阵
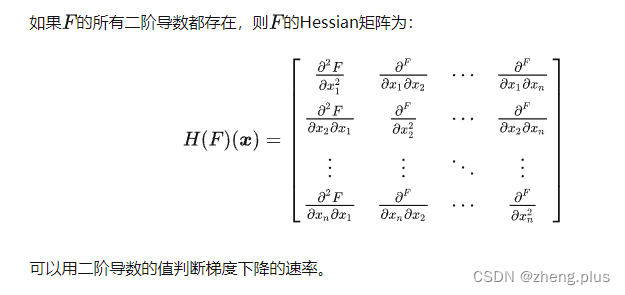
参考:https://zhuanlan.zhihu.com/p/138334587
拉格朗日乘数法
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-B4Es3Q9d-1670164330451)(./02differential.assets/image-20221204222030178.png)]
参考:https://zh.m.wikipedia.org/zh-hans/%E6%8B%89%E6%A0%BC%E6%9C%97%E6%97%A5%E4%B9%98%E6%95%B0
总结
- 沿梯度方向,函数变化速度是最快的。最优化方法中很多是基于梯度的。
- 多元函数链式法则是网状结构的,tensorflow求微分的方法就是这种网状结构。
- 对无条件的函数求极值,研究其梯度和Hessian矩阵即可;对有条件的函数求极值,使用拉格朗日乘数法转化为对无条件的函数求极值
版权声明:本文为weixin_42303366原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。