打开kinova description文件夹的urdf文件,添加以下代码即可:
<!-- Add realsense d435i -->
<xacro:arg name="use_nominal_extrinsics" default="false"/>
<xacro:include filename="$(find realsense2_description)/urdf/_d435i.urdf.xacro" />
<xacro:sensor_d435 parent="root" use_nominal_extrinsics="$(arg use_nominal_extrinsics)" >
<origin xyz="0.0 0.06 0.05" rpy="0 0 1.57"/>
</xacro:sensor_d435>
保存编译,打开终端roslaunch,打开可以显示机械臂urdf的launch文件,一般在description中的launch文件夹下。
效果如下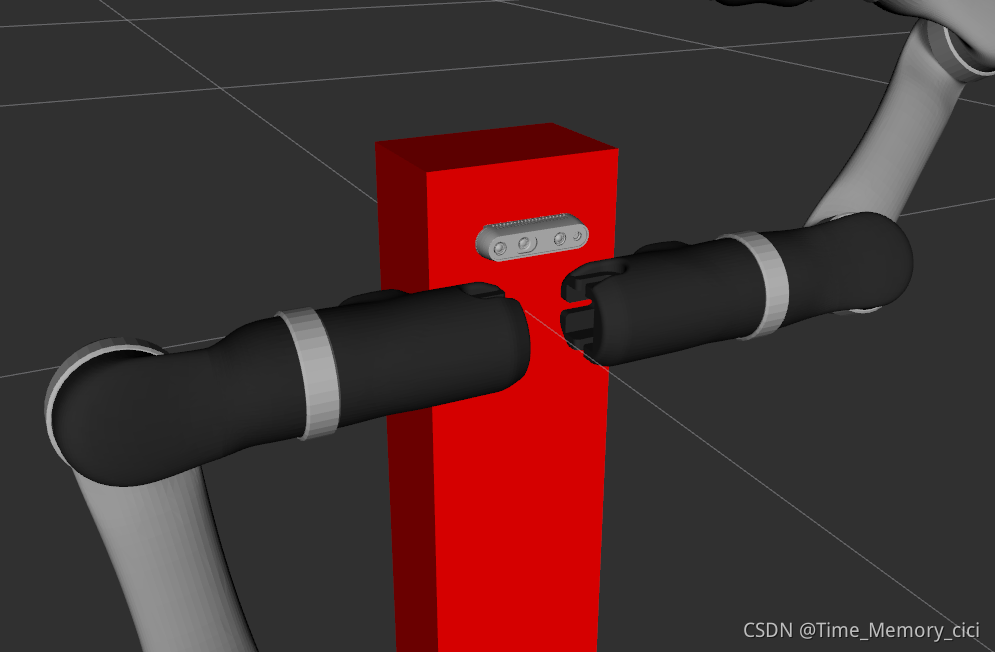
版权声明:本文为Time_Memory_cici原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。