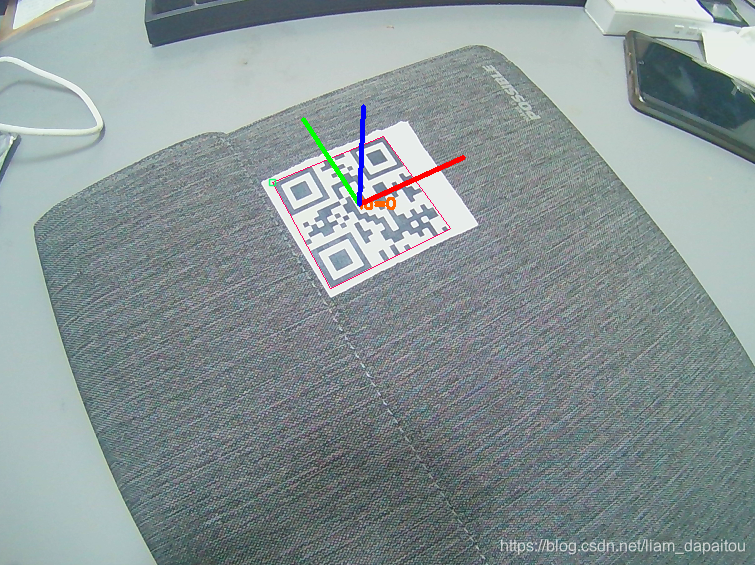
参考 opencv aruco 实现对单个QR码的检测与定位
aruco是opencv_contrib的一个模块,实现了对AR码的检测/姿态估计
使用aruco需要安装opencv_contrib,本文将aruco中姿态估计用到的函数提取出来,结合zbar对QR码识别定位.
效果如下图
安装zbar
# ubuntu apt install
sudo apt install libzbar-dev
将aruco中姿态估计用到的函数提取出来
estimate_marker_pose.h
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
//绘制坐标轴
void myDrawFrameAxes(InputOutputArray image, InputArray cameraMatrix, InputArray distCoeffs,
InputArray rvec, InputArray tvec, float length, int thickness);
//绘制边框以及id
void myDrawDetectedMarkers(InputOutputArray _image, InputArrayOfArrays _corners,
InputArray _ids, Scalar borderColor);
//生成实际四个定点的坐标
void myGetSingleMarkerObjectPoints(float markerLength, OutputArray _objPoints);
//解PnP获得旋转向量和平移向量
void myEstimatePoseSingleMarkers(InputArrayOfArrays _corners, float markerLength,
InputArray _cameraMatrix, InputArray _distCoeffs,
OutputArray _rvecs, OutputArray _tvecs);
estimate_marker_pose.cpp
#include <estimate_marker_pose.h>
using namespace std;
using namespace cv;
void myDrawFrameAxes(InputOutputArray image, InputArray cameraMatrix, InputArray distCoeffs,
InputArray rvec, InputArray tvec, float length, int thickness)
{
CV_Assert(image.getMat().total() > 0);
CV_Assert(length > 0);
// project axes points
vector<Point3f> axesPoints;
axesPoints.push_back(Point3f(0, 0, 0));
axesPoints.push_back(Point3f(length, 0, 0));
axesPoints.push_back(Point3f(0, length, 0));
axesPoints.push_back(Point3f(0, 0, length));
vector<Point2f> imagePoints;
projectPoints(axesPoints, rvec, tvec, cameraMatrix, distCoeffs, imagePoints);
// draw axes lines
line(image, imagePoints[0], imagePoints[1], Scalar(0, 0, 255), thickness);
line(image, imagePoints[0], imagePoints[2], Scalar(0, 255, 0), thickness);
line(image, imagePoints[0], imagePoints[3], Scalar(255, 0, 0), thickness);
}
void myDrawDetectedMarkers(InputOutputArray _image, InputArrayOfArrays _corners,
InputArray _ids, Scalar borderColor)
{
CV_Assert(_image.getMat().total() != 0 &&
(_image.getMat().channels() == 1 || _image.getMat().channels() == 3));
CV_Assert((_corners.total() == _ids.total()) || _ids.total() == 0);
// calculate colors
Scalar textColor, cornerColor;
textColor = cornerColor = borderColor;
swap(textColor.val[0], textColor.val[1]); // text color just sawp G and R
swap(cornerColor.val[1], cornerColor.val[2]); // corner color just sawp G and B
int nMarkers = (int)_corners.total();
for(int i = 0; i < nMarkers; i++) {
Mat currentMarker = _corners.getMat(i);
CV_Assert(currentMarker.total() == 4 && currentMarker.type() == CV_32FC2);
// draw marker sides
for(int j = 0; j < 4; j++) {
Point2f p0, p1;
p0 = currentMarker.ptr< Point2f >(0)[j];
p1 = currentMarker.ptr< Point2f >(0)[(j + 1) % 4];
line(_image, p0, p1, borderColor, 1);
}
// draw first corner mark
rectangle(_image, currentMarker.ptr< Point2f >(0)[0] - Point2f(3, 3),
currentMarker.ptr< Point2f >(0)[0] + Point2f(3, 3), cornerColor, 1, LINE_AA);
// draw ID
if(_ids.total() != 0) {
Point2f cent(0, 0);
for(int p = 0; p < 4; p++)
cent += currentMarker.ptr< Point2f >(0)[p];
cent = cent / 4.;
stringstream s;
s << "id=" << _ids.getMat().ptr< int >(0)[i];
putText(_image, s.str(), cent, FONT_HERSHEY_SIMPLEX, 0.5, textColor, 2);
}
}
}
void myGetSingleMarkerObjectPoints(float markerLength, OutputArray _objPoints) {
_objPoints.create(4, 1, CV_32FC3);
Mat objPoints = _objPoints.getMat();
// set coordinate system in the middle of the marker, with Z pointing out
objPoints.ptr< Vec3f >(0)[0] = Vec3f(-markerLength / 2.f, markerLength / 2.f, 0);
objPoints.ptr< Vec3f >(0)[1] = Vec3f(markerLength / 2.f, markerLength / 2.f, 0);
objPoints.ptr< Vec3f >(0)[2] = Vec3f(markerLength / 2.f, -markerLength / 2.f, 0);
objPoints.ptr< Vec3f >(0)[3] = Vec3f(-markerLength / 2.f, -markerLength / 2.f, 0);
}
void myEstimatePoseSingleMarkers(InputArrayOfArrays _corners, float markerLength,
InputArray _cameraMatrix, InputArray _distCoeffs,
OutputArray _rvecs, OutputArray _tvecs) {
Mat markerObjPoints;
myGetSingleMarkerObjectPoints(markerLength, markerObjPoints);
int nMarkers = (int)_corners.total();
_rvecs.create(nMarkers, 1, CV_64FC3);
_tvecs.create(nMarkers, 1, CV_64FC3);
Mat rvecs = _rvecs.getMat(), tvecs = _tvecs.getMat();
for each marker, calculate its pose
parallel_for_(Range(0, nMarkers), [&](const Range& range) {
const int begin = range.start;
const int end = range.end;
for (int i = begin; i < end; i++) {
solvePnP(markerObjPoints, _corners.getMat(i), _cameraMatrix, _distCoeffs, rvecs.at<Vec3d>(i),
tvecs.at<Vec3d>(i));
}
});
}
main.cpp
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/opencv.hpp>
#include <iostream>
#include <zbar.h>
#include <estimate_marker_pose.h>
#include <opencv2/imgproc/types_c.h>
using namespace std;
using namespace zbar; //添加zbar名称空间
using namespace cv;
int main(int argc,char*argv[])
{
cout<< "CV_VERSION: " << CV_VERSION << endl;
//相机标定的参数-------
double fx = 412.433229;
double cx = 318.310004;
double fy = 414.182775;
double cy = 236.769192;
double k1 = -0.320394;
double k2 = 0.108028;
double p1 = -0.000993;
double p2 = 0.001297;
double k3 = 0;
Mat cameraMatrix = (cv::Mat_<float>(3, 3) <<
fx, 0.0, cx,
0.0, fy, cy,
0.0, 0.0, 1.0);
Mat distCoeffs = (cv::Mat_<float>(5, 1) << k1, k2, p1, p2, k3);
//相机标定的参数-------
//二维码的边长
double marker_size = 5.0; //单位 cm
//zbar::ImageScanner
ImageScanner scanner;
scanner.set_config(ZBAR_NONE, ZBAR_CFG_ENABLE, 1);
cv::VideoCapture inputVideo;
inputVideo.open(0);
inputVideo.set(cv::CAP_PROP_FRAME_WIDTH,1280);
inputVideo.set(cv::CAP_PROP_FRAME_HEIGHT,720);
while (inputVideo.grab())
{
cv::Mat image;
inputVideo.retrieve(image);//抓取视频中的一张照片
flip(image,image,1);// 水平方向镜像
Mat imageGray;
cvtColor(image,imageGray,CV_RGB2GRAY);
int width = imageGray.cols;
int height = imageGray.rows;
uchar *raw = (uchar *)imageGray.data;
Image imageZbar(width, height, "Y800", raw, width * height);
scanner.scan(imageZbar); //扫描条码
Image::SymbolIterator symbol = imageZbar.symbol_begin();
if(imageZbar.symbol_begin()==imageZbar.symbol_end())
{
cout<<"can't detect QR code!"<<endl;
}
std::vector<int> ids;
std::vector<std::vector<cv::Point2f> > corners;
std::vector<cv::Vec3d> rvecs, tvecs;
for(int i = 0;symbol != imageZbar.symbol_end();++symbol)
{
cout<<"type:"<<endl<<symbol->get_type_name()<<endl<<endl;
cout<<"data:"<<endl<<symbol->get_data()<<endl<<endl;
cout<<"data_length:"<<endl<<symbol->get_data_length()<<endl<<endl;
cout<<"location_size:"<<endl<<symbol->get_location_size()<<endl<<endl;
std::vector<cv::Point2f> corner;
corner.push_back(cv::Point2f(symbol->get_location_x(0),symbol->get_location_y(0)));
corner.push_back(cv::Point2f(symbol->get_location_x(3),symbol->get_location_y(3)));
corner.push_back(cv::Point2f(symbol->get_location_x(2),symbol->get_location_y(2)));
corner.push_back(cv::Point2f(symbol->get_location_x(1),symbol->get_location_y(1)));
corners.push_back(corner);
ids.push_back(i);
i++;
}
//求解旋转向量rvecs和平移向量tvecs
myEstimatePoseSingleMarkers(corners, marker_size, cameraMatrix, distCoeffs, rvecs, tvecs);
for (int i = 0; i < ids.size(); i ++)
{
// cv::aruco::drawDetectedMarkers(image, corners, ids);//绘制检测到的靶标的框
myDrawDetectedMarkers(image, corners, ids,Scalar(100, 0, 255));//绘制检测到的靶标的框
// cv::aruco::drawAxis(image, cameraMatrix, distCoeffs, rvecs[i], tvecs[i], 5);
myDrawFrameAxes(image, cameraMatrix, distCoeffs, rvecs[i], tvecs[i], 5, 3);
// drawFrameAxes(image, cameraMatrix, distCoeffs, rvecs[i], tvecs[i], 5, 3);//opencv 3.3.1 没有 4.2.1有
cout<<" T :"<<tvecs[i]<<endl;
cout<<" R :"<<rvecs[i]<<endl;
}
imshow("Source Image",image);
waitKey(1);
}
return 0;
}
CMakeLists.txt
# estimate_marker_pose
add_library( estimate_marker_pose src/estimate_marker_pose.cpp)
target_link_libraries(estimate_marker_pose ${OpenCV_LIBS} )
# main
add_executable(main src/main.cpp)
target_link_libraries(main zbar estimate_marker_pose ${OpenCV_LIBS} )
打印
type:
QR-Code
data:
1
data_length:
1
location_size:
4
T :[2.16432, -0.594964, 15.9725]
R :[2.47789, -0.487188, -0.156933]
版权声明:本文为liam_dapaitou原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。