一、2D-2D相机位姿估计
2D-2D相机位姿估计 通常利用 对极几何 进行计算,是单目SLAM初始化时的关键技术。
2D-2D 对极几何 主要涉及到基础矩阵、本质矩阵和单应性矩阵的求解,并从中恢复出旋转矩阵 R 和平移向量 t,参考基础矩阵F和本质矩阵E 单应矩阵H计算 ,然后三角化一些点,参考三角形法

注意事项:
1.使用条件
计算基础矩阵或本质矩阵 适用于特征点不共面的情况,计算 单应矩阵 适用于特征点共面的情况
2.退化.
当特征点共面或者相机发生纯旋转时,基础矩阵 F的自由度下降,就会出现所谓的退化(degenerate)。为了能够避免退化现 象的影响,通常会同时估计基础矩阵 F和 单应矩阵 H,选择重投影误差比较小的那个作为最终的运动估计矩阵。
3. 尺度不确定性
尺度不确定性,用上面的方法估计出的相机平移向量t的值并没有单位,也就是说相机移动的距离只有相对值,没有绝对值。这是 单目相机固有的尺度不确定性问题,无法从根本上解决。因此单目SLAM中一般把初始化后的t归一化,即把初始化时移动的距离默认为1,此后的距离都以这个1为单位。
4.初始化问题
初始化的纯旋转问题:单目初始化不能只有旋转,必须要有一定程度的平移,否则由于t趋近于0,导致无从求解R或者误差非常大
5.多于8对点:RANSAC
如果匹配的点对数多于8(大多数情况都是这样),可以考虑充分利用这些点,而不是只从中选择8对用于计算。推荐的算法是随机采样一致性(Random Sample Consensus,RANSAC),该算法可以有效地避免错误数据对整体结果的影响。在代码中,只需要将findFundamentalMat函数的第三个参数从CV_FM_8POINT换成CV_FM_RANSAC就可以了。
Ref: 2D-2D相机位姿估计 计算机视觉对极几何之FEH
opencv函数实现2D-2D相机姿态估计
void pose_estimation_2d2d ( std::vector<KeyPoint> keypoints_1,
std::vector<KeyPoint> keypoints_2,
std::vector< DMatch > matches,
Mat& R, Mat& t )
{
// 相机内参,TUM Freiburg2
Mat K = ( Mat_<double> ( 3,3 ) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1 );
//-- 把匹配点转换为vector<Point2f>的形式
vector<Point2f> points1;
vector<Point2f> points2;
for ( int i = 0; i < ( int ) matches.size(); i++ )
{
points1.push_back ( keypoints_1[matches[i].queryIdx].pt );
points2.push_back ( keypoints_2[matches[i].trainIdx].pt );
}
//-- 计算基础矩阵
Mat fundamental_matrix;
fundamental_matrix = findFundamentalMat ( points1, points2, CV_FM_8POINT );
cout<<"fundamental_matrix is "<<endl<< fundamental_matrix<<endl;
//-- 计算本质矩阵
Point2d principal_point ( 325.1, 249.7 ); //相机光心, TUM dataset标定值
double focal_length = 521; //相机焦距, TUM dataset标定值
Mat essential_matrix;
essential_matrix = findEssentialMat ( points1, points2, focal_length, principal_point );
cout<<"essential_matrix is "<<endl<< essential_matrix<<endl;
//-- 计算单应矩阵
Mat homography_matrix;
homography_matrix = findHomography ( points1, points2, RANSAC, 3 );
cout<<"homography_matrix is "<<endl<<homography_matrix<<endl;
//-- 从本质矩阵中恢复旋转和平移信息.
recoverPose ( essential_matrix, points1, points2, R, t, focal_length, principal_point );
cout<<"R is "<<endl<<R<<endl;
cout<<"t is "<<endl<<t<<endl;
}二、3D-2D相机位姿估计
PnP(Perspective-n-Point) 是求解3D到2D点对运动的方法,它描述了当知道n个空间点及其投影位置时,如何估计相机的姿态。 求解PnP问题目前主要有直接线性变换(DLT)、P3P、EPnP、UPnP以及非线性优化方法。维基百科Perspective-n-Point(Wikipedia)
1.直线线性变换法DLT
考虑某个空间点,坐标为,图像I1中,投影到特征点
(归一化平面平面的坐标),此时的相机位姿为R,t是未知的。写T=【R,t】

T的行向量为t1,t2,t3 ,化简得
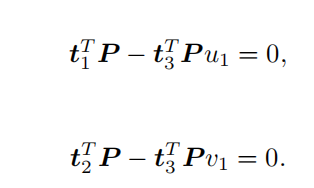
一对匹配点得到2对 ,T有12个元素,至少需要6对点匹配,对于大于6点可采用SVD进行超定方程的求解
注意:需要对左边的3*3的矩阵块用一个最好的旋转矩阵来近似,可以用QR分解完成。
2. 三对点匹配P3P算法
P3P原理示意图:

以上的图,OA,OB,OC是未知量。x=OA/OC,y=OB/OC,用余弦定理得到:

把等式右侧的三项设为v,u*v,w*v,v=AB2/OC2,u=BC2/AB2,w=AC2/AB2是已知的,cos都已知,那么目前是x,y不知道,v不知道。把 第一个式子代入后俩,消去v,式子变成:

求出x,y以后,代入第上面三个式子中的第一个,可以求出v,v是AB2/OC2,就可以求出OC
注意事项:
1.cos值:2D点图像位置已知,光心位置已知,可以计算其夹角,进而计算余弦。
2.P3P只利用了3点的信息,当给的匹配点多于3个得时候。难于利用更多的信息
3.如果3D或2D点的受噪声的影响,或者出现无匹配时,则算法失效
4.相机坐标系下3D坐标已知,可以据此求解3D-3D的ICP问题。
opencv函数设计函数:
- solvePnP
- Rodrigues
vector<KeyPoint> keypoints_1, keypoints_2;
vector<DMatch> matches;
find_feature_matches ( img_1, img_2, keypoints_1, keypoints_2, matches );
cout<<"一共找到了"<<matches.size() <<"组匹配点"<<endl;
// 建立3D点
Mat d1 = imread ( argv[3], CV_LOAD_IMAGE_UNCHANGED ); // 深度图为16位无符号数,单通道图像
Mat K = ( Mat_<double> ( 3,3 ) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1 );
vector<Point3f> pts_3d;
vector<Point2f> pts_2d;
for ( DMatch m:matches )
{
ushort d = d1.ptr<unsigned short> (int ( keypoints_1[m.queryIdx].pt.y )) [ int ( keypoints_1[m.queryIdx].pt.x ) ];
if ( d == 0 ) // bad depth
continue;
float dd = d/5000.0;
Point2d p1 = pixel2cam ( keypoints_1[m.queryIdx].pt, K );
pts_3d.push_back ( Point3f ( p1.x*dd, p1.y*dd, dd ) );
pts_2d.push_back ( keypoints_2[m.trainIdx].pt );
}
cout<<"3d-2d pairs: "<<pts_3d.size() <<endl;
Mat r, t;
solvePnP ( pts_3d, pts_2d, K, Mat(), r, t, false ); // 调用OpenCV 的 PnP 求解,可选
择EPNP,DLS等方法
Mat R;
cv::Rodrigues ( r, R ); // r为旋转向量形式,用Rodrigues公式转换为矩阵
cout<<"R="<<endl<<R<<endl;
cout<<"t="<<endl<<t<<endl;
cout<<"calling bundle adjustment"<<endl;3.非线性优化BA
在双目或RGB-D的视觉里程计中,可以直接使用PnP估计相机运动;而在单目视觉里程计中,必须先进行初始化,然后才能使用PnP。在SLAM中,通常先使用 P3P或EPnP 等方法估计相机位姿,再构建最小二乘优化问题对估计值进行调整(BA)。
把 PnP问题 构建成一个定义于李代数上的非线性最小二乘问题,求解最好的相机位姿。
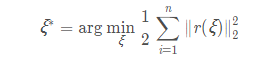
定义 残差(观测值-预测值)或 重投影误差
![]()
构建最小二乘问题:
采用的g2o库优化工具:
void bundleAdjustment (
const vector< Point3f > points_3d,
const vector< Point2f > points_2d,
const Mat& K,
Mat& R, Mat& t )
{
// 初始化g2o
typedef g2o::BlockSolver< g2o::BlockSolverTraits<6,3> > Block; // pose 维度为 6, landmark 维度为 3
Block::LinearSolverType* linearSolver = new g2o::LinearSolverCSparse<Block::PoseMatrixType>(); // 线性方程求解器
Block* solver_ptr = new Block ( linearSolver ); // 矩阵块求解器
g2o::OptimizationAlgorithmLevenberg* solver = new g2o::OptimizationAlgorithmLevenberg ( solver_ptr );
g2o::SparseOptimizer optimizer;
optimizer.setAlgorithm ( solver );
// vertex
g2o::VertexSE3Expmap* pose = new g2o::VertexSE3Expmap(); // camera pose
Eigen::Matrix3d R_mat;
R_mat <<
R.at<double> ( 0,0 ), R.at<double> ( 0,1 ), R.at<double> ( 0,2 ),
R.at<double> ( 1,0 ), R.at<double> ( 1,1 ), R.at<double> ( 1,2 ),
R.at<double> ( 2,0 ), R.at<double> ( 2,1 ), R.at<double> ( 2,2 );
pose->setId ( 0 );
pose->setEstimate ( g2o::SE3Quat (
R_mat,
Eigen::Vector3d ( t.at<double> ( 0,0 ), t.at<double> ( 1,0 ), t.at<double> ( 2,0 ) )
) );
optimizer.addVertex ( pose );
int index = 1;
for ( const Point3f p:points_3d ) // landmarks
{
g2o::VertexSBAPointXYZ* point = new g2o::VertexSBAPointXYZ();
point->setId ( index++ );
point->setEstimate ( Eigen::Vector3d ( p.x, p.y, p.z ) );
point->setMarginalized ( true ); // g2o 中必须设置 marg 参见第十讲内容
optimizer.addVertex ( point );
}
// parameter: camera intrinsics
g2o::CameraParameters* camera = new g2o::CameraParameters (
K.at<double> ( 0,0 ), Eigen::Vector2d ( K.at<double> ( 0,2 ), K.at<double> ( 1,2 ) ), 0
);
camera->setId ( 0 );
optimizer.addParameter ( camera );
// edges
index = 1;
for ( const Point2f p:points_2d )
{
g2o::EdgeProjectXYZ2UV* edge = new g2o::EdgeProjectXYZ2UV();
edge->setId ( index );
edge->setVertex ( 0, dynamic_cast<g2o::VertexSBAPointXYZ*> ( optimizer.vertex ( index ) ) );
edge->setVertex ( 1, pose );
edge->setMeasurement ( Eigen::Vector2d ( p.x, p.y ) );
edge->setParameterId ( 0,0 );
edge->setInformation ( Eigen::Matrix2d::Identity() );
optimizer.addEdge ( edge );
index++;
}
chrono::steady_clock::time_point t1 = chrono::steady_clock::now();
optimizer.setVerbose ( true );
optimizer.initializeOptimization();
optimizer.optimize ( 100 );
chrono::steady_clock::time_point t2 = chrono::steady_clock::now();
chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>> ( t2-t1 );
cout<<"optimization costs time: "<<time_used.count() <<" seconds."<<endl;
cout<<endl<<"after optimization:"<<endl;
cout<<"T="<<endl<<Eigen::Isometry3d ( pose->estimate() ).matrix() <<endl;
}
ref 视觉SLAM位姿估计
三、3D-3D相机位姿估计
3D-2D相机位姿估计,采用PnP方法估计单目SLAM的相机位姿。而对于RGBD深度相机来说,每张图片都有深度信息,如果还用PnP方法,就无法充分利用已知的信息。本部分将介绍专门用于3D-3D相机位姿估计的方法。
两组3D点中恢复出相机位姿信息的方法通常称为迭代最近点(Iterative Closest Point,ICP)。和PnP类似,ICP的求解也分为两种方式:利用线性代数求解(SVD方法)以及利用非线性优化方式求解(类似于Bundle Adjustment)
1.SVD线性求解
推导:

代码:
void pose_estimation_3d3d (
const vector<Point3f>& pts1,
const vector<Point3f>& pts2,
Mat& R, Mat& t
)
{
Point3f p1, p2; // center of mass
int N = pts1.size();
for ( int i=0; i<N; i++ )
{
p1 += pts1[i];
p2 += pts2[i];
}
p1 = Point3f( Vec3f(p1) / N);
p2 = Point3f( Vec3f(p2) / N);
vector<Point3f> q1 ( N ), q2 ( N ); // remove the center
for ( int i=0; i<N; i++ )
{
q1[i] = pts1[i] - p1;
q2[i] = pts2[i] - p2;
}
// compute q1*q2^T
Eigen::Matrix3d W = Eigen::Matrix3d::Zero();
for ( int i=0; i<N; i++ )
{
W += Eigen::Vector3d ( q1[i].x, q1[i].y, q1[i].z ) * Eigen::Vector3d ( q2[i].x, q2[i].y, q2[i].z ).transpose();
}
cout<<"W="<<W<<endl;
// SVD on W
Eigen::JacobiSVD<Eigen::Matrix3d> svd ( W, Eigen::ComputeFullU|Eigen::ComputeFullV );
Eigen::Matrix3d U = svd.matrixU();
Eigen::Matrix3d V = svd.matrixV();
cout<<"U="<<U<<endl;
cout<<"V="<<V<<endl;
Eigen::Matrix3d R_ = U* ( V.transpose() );
Eigen::Vector3d t_ = Eigen::Vector3d ( p1.x, p1.y, p1.z ) - R_ * Eigen::Vector3d ( p2.x, p2.y, p2.z );
// convert to cv::Mat
R = ( Mat_<double> ( 3,3 ) <<
R_ ( 0,0 ), R_ ( 0,1 ), R_ ( 0,2 ),
R_ ( 1,0 ), R_ ( 1,1 ), R_ ( 1,2 ),
R_ ( 2,0 ), R_ ( 2,1 ), R_ ( 2,2 )
);
t = ( Mat_<double> ( 3,1 ) << t_ ( 0,0 ), t_ ( 1,0 ), t_ ( 2,0 ) );
}2.非线性优化BA
仍然是构造一个图优化问题,这里我们把相机位姿作为优化变量,3D点对之间的坐标变换作为误差项。由于g2o没有为我们提供3D到3D的边,因此需要我们自己来定义。这是一个一元边,观测量即3D点的维度为3,代码如下所示
// g2o edge
class EdgeProjectXYZRGBDPoseOnly : public g2o::BaseUnaryEdge<3, Eigen::Vector3d, g2o::VertexSE3Expmap>
{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
EdgeProjectXYZRGBDPoseOnly( const Eigen::Vector3d& point ) : _point(point) {}
virtual void computeError()
{
const g2o::VertexSE3Expmap* pose = static_cast<const g2o::VertexSE3Expmap*> ( _vertices[0] );
// measurement is p, point is p'
_error = _measurement - pose->estimate().map( _point );
}
virtual void linearizeOplus()
{
g2o::VertexSE3Expmap* pose = static_cast<g2o::VertexSE3Expmap *>(_vertices[0]);
g2o::SE3Quat T(pose->estimate());
Eigen::Vector3d xyz_trans = T.map(_point);
double x = xyz_trans[0];
double y = xyz_trans[1];
double z = xyz_trans[2];
_jacobianOplusXi(0,0) = 0;
_jacobianOplusXi(0,1) = -z;
_jacobianOplusXi(0,2) = y;
_jacobianOplusXi(0,3) = -1;
_jacobianOplusXi(0,4) = 0;
_jacobianOplusXi(0,5) = 0;
_jacobianOplusXi(1,0) = z;
_jacobianOplusXi(1,1) = 0;
_jacobianOplusXi(1,2) = -x;
_jacobianOplusXi(1,3) = 0;
_jacobianOplusXi(1,4) = -1;
_jacobianOplusXi(1,5) = 0;
_jacobianOplusXi(2,0) = -y;
_jacobianOplusXi(2,1) = x;
_jacobianOplusXi(2,2) = 0;
_jacobianOplusXi(2,3) = 0;
_jacobianOplusXi(2,4) = 0;
_jacobianOplusXi(2,5) = -1;
}
bool read ( istream& in ) {}
bool write ( ostream& out ) const {}
protected:
Eigen::Vector3d _point;
};
void bundleAdjustment (
const vector< Point3f >& pts1,
const vector< Point3f >& pts2,
Mat& R, Mat& t )
{
// 初始化g2o
typedef g2o::BlockSolver< g2o::BlockSolverTraits<6,3> > Block; // pose维度为 6, landmark 维度为 3
Block::LinearSolverType* linearSolver = new g2o::LinearSolverEigen<Block::PoseMatrixType>(); // 线性方程求解器
Block* solver_ptr = new Block( linearSolver ); // 矩阵块求解器
g2o::OptimizationAlgorithmGaussNewton* solver = new g2o::OptimizationAlgorithmGaussNewton( solver_ptr );
g2o::SparseOptimizer optimizer;
optimizer.setAlgorithm( solver );
// vertex
g2o::VertexSE3Expmap* pose = new g2o::VertexSE3Expmap(); // camera pose
pose->setId(0);
pose->setEstimate( g2o::SE3Quat(
Eigen::Matrix3d::Identity(),
Eigen::Vector3d( 0,0,0 )
) );
optimizer.addVertex( pose );
// edges
int index = 1;
vector<EdgeProjectXYZRGBDPoseOnly*> edges;
for ( size_t i=0; i<pts1.size(); i++ )
{
EdgeProjectXYZRGBDPoseOnly* edge = new EdgeProjectXYZRGBDPoseOnly(
Eigen::Vector3d(pts2[i].x, pts2[i].y, pts2[i].z) );
edge->setId( index );
edge->setVertex( 0, dynamic_cast<g2o::VertexSE3Expmap*> (pose) );
edge->setMeasurement( Eigen::Vector3d(
pts1[i].x, pts1[i].y, pts1[i].z) );
edge->setInformation( Eigen::Matrix3d::Identity()*1e4 );
optimizer.addEdge(edge);
index++;
edges.push_back(edge);
}
chrono::steady_clock::time_point t1 = chrono::steady_clock::now();
optimizer.setVerbose( true );
optimizer.initializeOptimization();
optimizer.optimize(10);
chrono::steady_clock::time_point t2 = chrono::steady_clock::now();
chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>(t2-t1);
cout<<"optimization costs time: "<<time_used.count()<<" seconds."<<endl;
cout<<endl<<"after optimization:"<<endl;
cout<<"T="<<endl<<Eigen::Isometry3d( pose->estimate() ).matrix()<<endl;
}
ref 3D-3D相机位姿估计
参考:
1.https://blog.csdn.net/u011178262/article/details/89685134
2.https://blog.csdn.net/u011178262/article/details/85016981(雅各比)
3.https://www.jianshu.com/p/504f0e5d9c26