这个ros功能包的创建流程,适合初学的小白
1:找一个合适的目录创建一个文件夹,本文目录选择了一个名字是ac的文件夹来创建功能包,新创建文件夹的名字可以随便起,建议最好用英文,要不在编译其他文件的时候可能会出现错误。
在要创建功能包的文件夹下输入命令创建功能包的文件夹,收入的命令和在输入成功后在终端显示的命令如下图所示:
mkdir de_ws
创建成功后在文件里显示样子:

2在刚刚创建的de_ws文件夹下面创建src的功能包,注意:这个名字只能是src,不能更换成其他名字,在终端输入的命令和显示的截图下图所示:
lscd de_wsmkdir src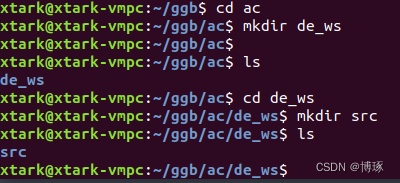
创建成功后文件夹显示的样子如下图所示:

打开src文件会发现是空的什么也没有,如下图所示:

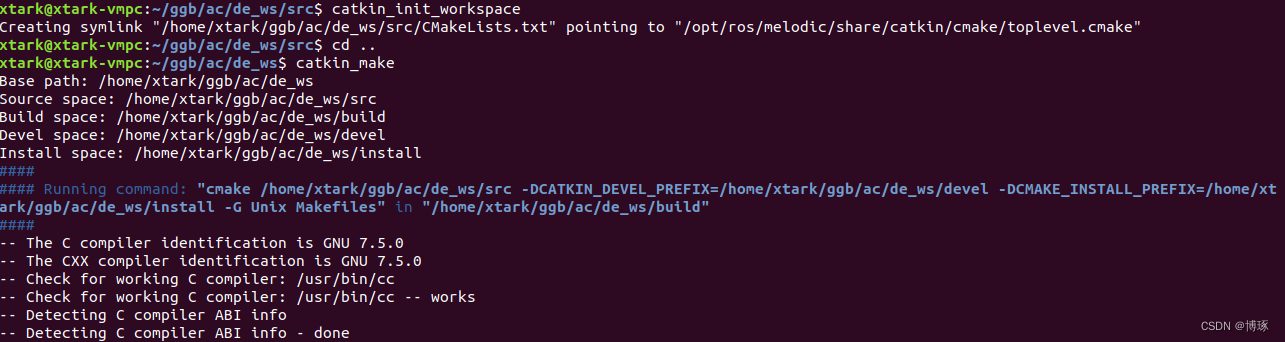
3使用catkin_init_workspace把当前文件夹初始化,将属性发生改变,变成ros的工作空间,命令如和终端截图如下图所示:
cd de_wscd srccatkin_init_workspace
打开src文件夹会看到一个cmakelist.txt文件,如下图所示:

4:然后可以对这个新创建的功能包使用catkin_make进行编译,检验一下是否编译成功, 请注意:在编译ros功能包的时候要在功能包的那个文件(比如文本是de_ws文件夹)编译,不要在src文件夹下编译。编译的命令和终端截图如下图所示:
cd ..catkin_make开始部分:
编译到最后部分:

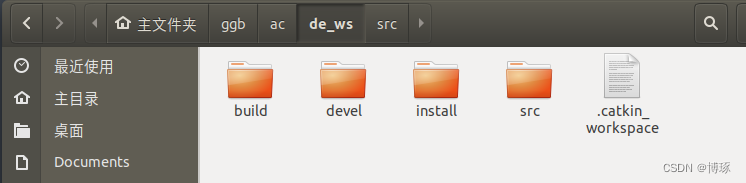
de_ws文件夹下显示的样子:

5由上图可知还缺少install工作空间,所以接下来创建install空间,命令和终端截图如下图所示:
catkin_make install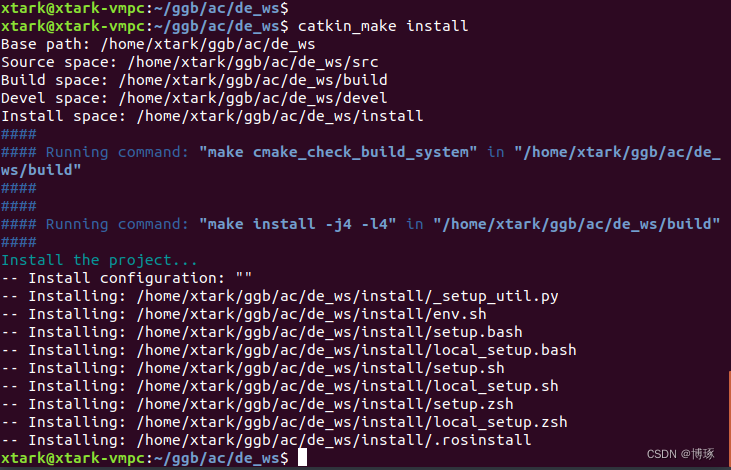
文件夹下的截图,如下图所示:
6创建编写代码的功能包,编写代码的功能包需要在src下面编写,形式是catkin_creat_pkg 包名 依赖 ,命令和终端截图如下图所示:
cd srccatkin_create_pkg test_pkg std_msgs rospy roscpp
文件夹的形式如下图所示:
7:在来编译一下:
cd ..catkin_make开始部分

到最后部分:

8设置环境变量
source devel/setup.bash
9确保工作区被安装脚本正确覆盖:
echo $ROS_PACKAGE_PATH
以上就是创建功能包的详细过程,苦心人天不负,加油呀,赶路人。