參考這篇文章,分分钟解决问题,感谢博主。
参考链接:
https://blog.csdn.net/m0_46259024/article/details/105333552
这里总结一下出现的问题。
问题1.roslaunch mbot_description display_mbot_base_urdf.launch报错
[WARN] [1582867522.390661]: The ‘use_gui’ parameter was specified, which is deprecated. We’ll attempt to find and run the GUI, but if this fails you should install the ‘joint_state_publisher_gui’ package instead and run that. This backwards compatibility option will be removed in Noetic.
[ERROR] [1582867522.392212]: Could not find the GUI, install the ‘joint_state_publisher_gui’ package
[joint_state_publisher-2] process has died [pid 9056, exit code 1, cmd /opt/ros/melodic/lib/joint_state_publisher/joint_state_publisher __name:=joint_state_publisher __log:=/home/vtas/.ros/log/b6cbe59e-59ea-11ea-b2f1-84ef181f5770/joint_state_publisher-2.log].
log file: /home/vtas/.ros/log/b6cbe59e-59ea-11ea-b2f1-84ef181f5770/joint_state_publisher-2.log*
解决方法:
1、joint_state_publisher_gui是刚更新出来的包,需要把之前的joint_state_publisher换成joint_state_publisher_gui
sudo apt-get install ros-kinetic-joint-state-publisher-gui
2、URDF文件中不能有中文注释,删除掉中文注释;
3、把原来的joint_state_publisher用joint_state_publisher_gui全部替换,就没有警告了。
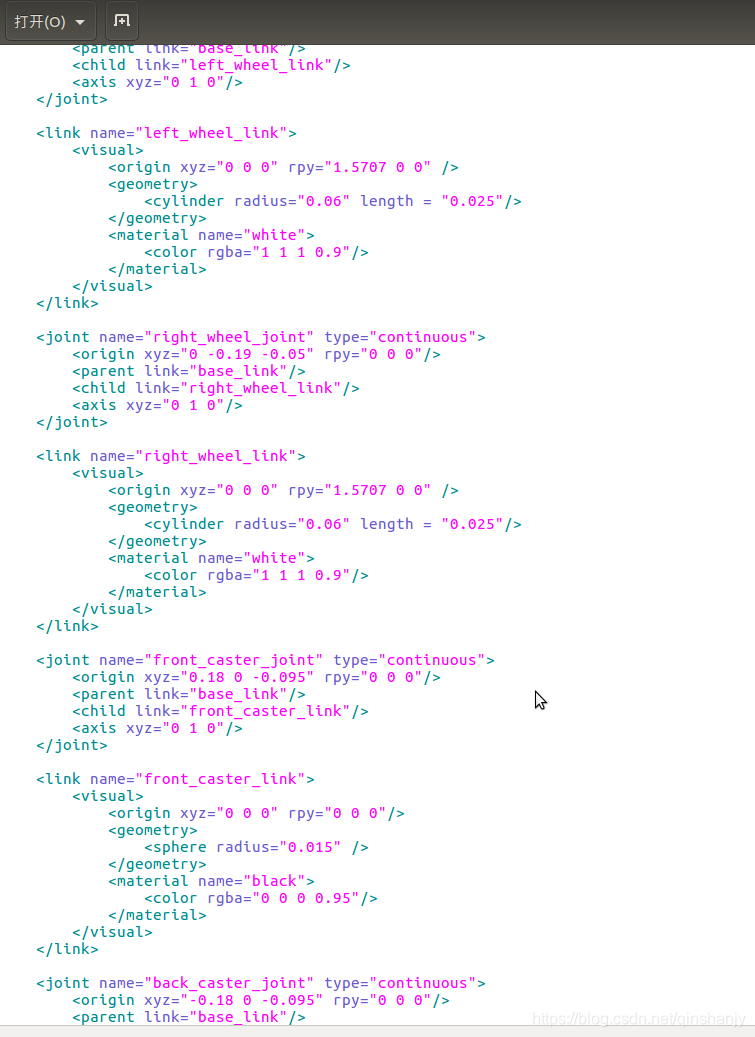
问题2.编译urdf文件时,提示Error: Error reading end tag.
解决方法:
xml的文件都是以name和/name成对出现的
注意踏着写参数半径,关节的偏移设置
————————————————
版权声明:本文为CSDN博主「鸣蜩。」的原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/m0_46259024/article/details/105333552