<1>问题描述:
b站赵虚左老师的ros教程中,gazebo生成小车模型后,出现原地缓慢打转和x、y轴方向缓慢移动问题。
细节如下图所示
初始生成的小车
过一会就能明显发现小车原地逆时针旋转,查看里程计位姿发生偏移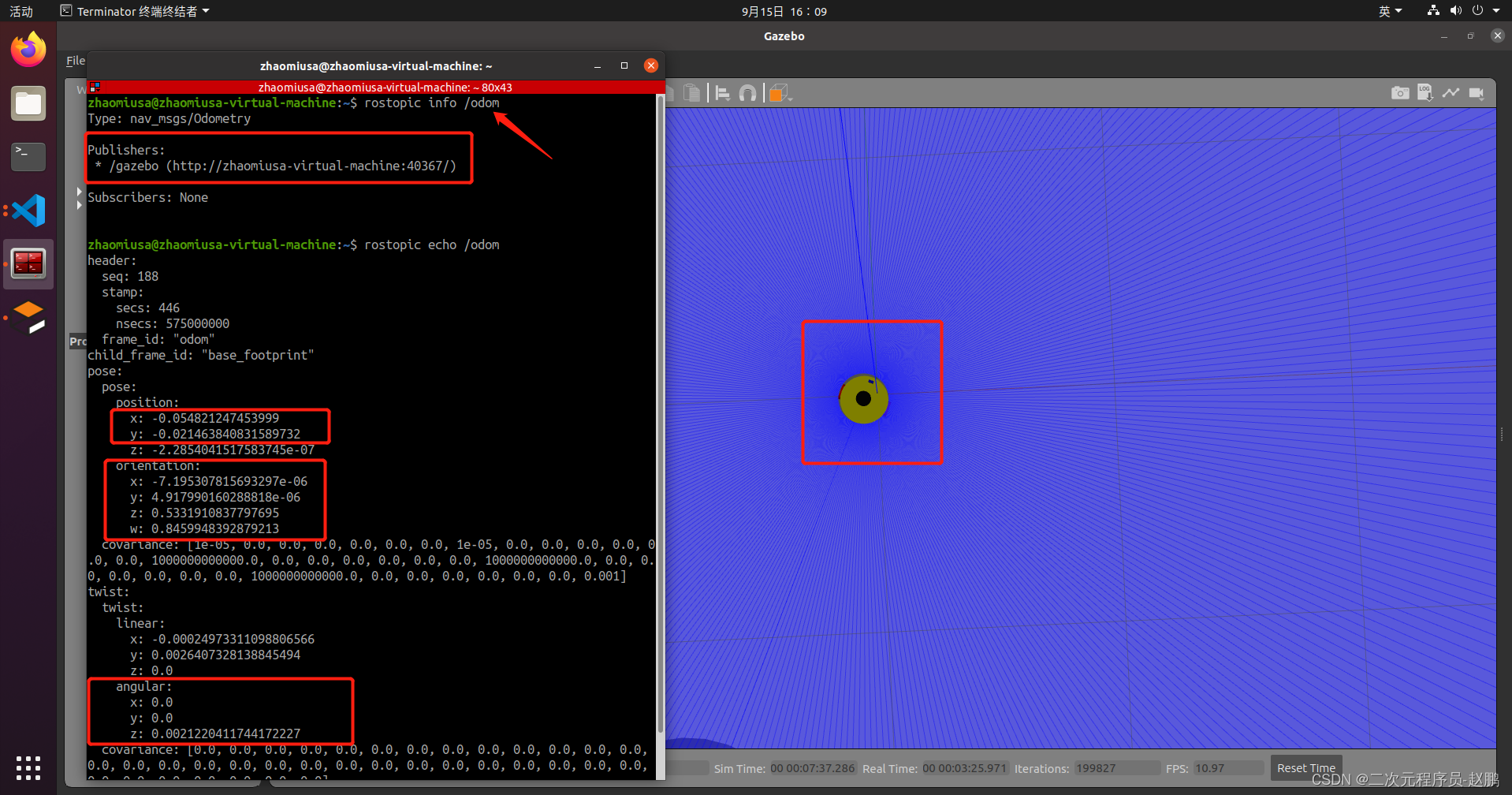
<2>分析:查看/odom位姿信息,发现出现不该出现的线速度和角速度,因为/cmd_vel没有发布方
网上搜了好久没有适合的解决方案,最后从小车xacro文件尝试修改参数最终成功解决。
<3>亲测解决的参考方案:修改小车驱动和万向轮质量mass参数
具体做法如下:
首先打开 demo05_car_base.urdf.xacro
然后底盘、驱动轮、万向轮mass在教程中分别对应为:2、0.05、0.01修改为3.5、0.1、0.05
效果如下图模型生成800s过后小车基本还在原地,里程计/odom话题下的位姿信息坐标值、四元数以及 x、y方向线速度与绕z轴的偏航角角速度几乎为0,问题解决!
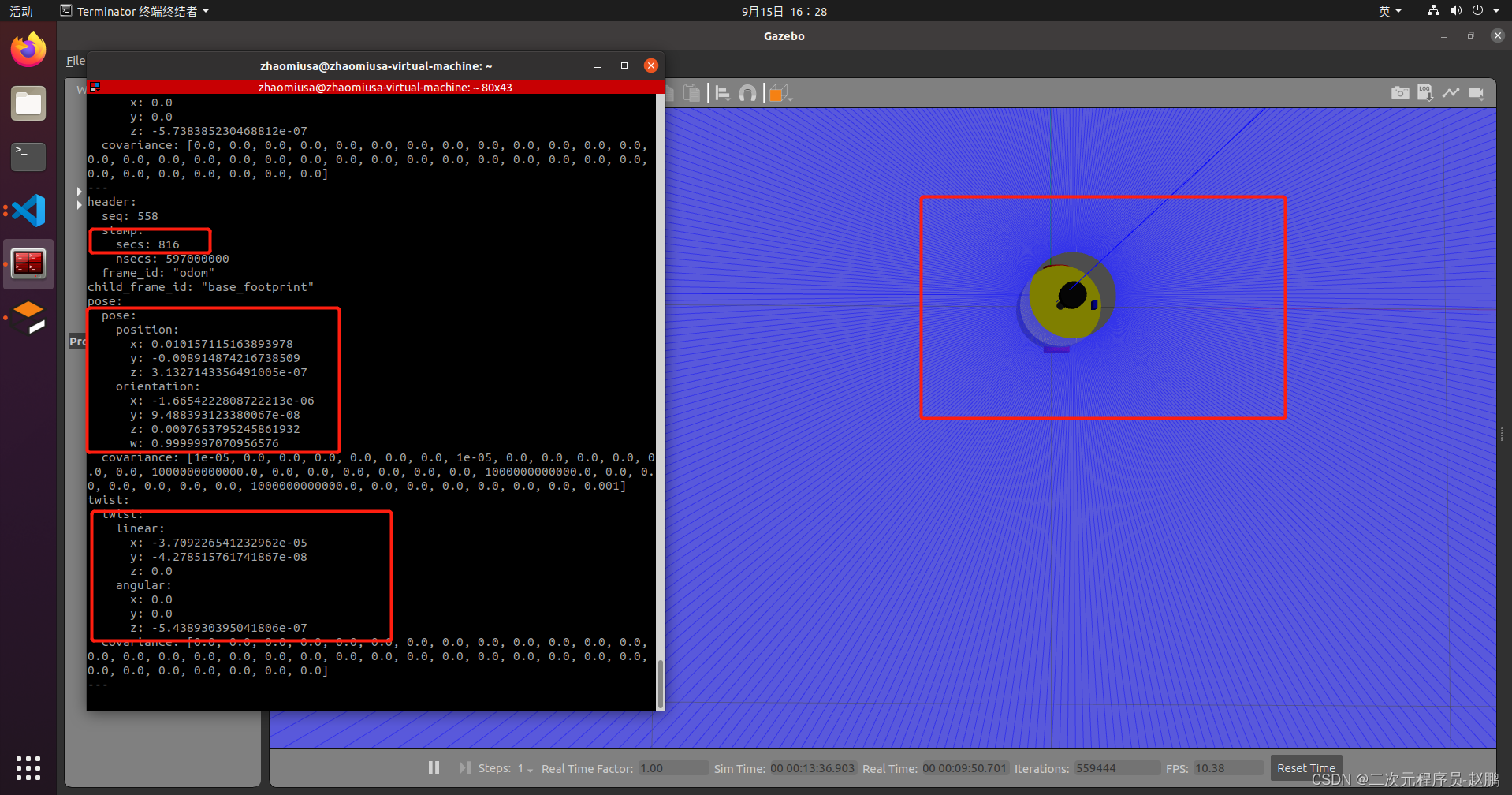
最后上述参数可以自己微微调整,思路就是微调大模型底盘和轮子质量,具体原理与其他解决方案欢迎同学们评论区讨论,如果方案有效请给个点赞或关注谢谢O(∩_∩)O
最后附demo05_car_base.urdf.xacro 代码
<robot name="mycar" xmlns:xacro="http://wiki.ros.org/xacro">
<!-- 添加 base_footprint -->
<!-- 属性 -->
<xacro:property name="footprint_radius" value="0.001"/>
<link name="base_footprint">
<visual>
<geometry>
<sphere radius="${footprint_radius}"/>
</geometry>
</visual>
</link>
<!-- 2.添加底盘 -->
<!--
形状: 圆柱
半径:0.1m
高度: 0.08m
离地: 0.015m
-->
<!-- 属性封装 -->
<xacro:property name="base_radius" value="0.1" />
<xacro:property name="base_length" value="0.08" />
<xacro:property name="base_mass" value="3.5" />
<xacro:property name="lidi" value="0.015" />
<xacro:property name="base_joint_z" value="${base_length / 2 + lidi}" />
<!-- 2-1.link -->
<link name="base_link">
<visual>
<geometry>
<cylinder radius="${base_radius}" length="${base_length}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<material name="baselink_color">
<color rgba="0.1 0.5 0.2 0.7"/>
</material>
</visual>
<collision>
<geometry>
<cylinder radius="${base_radius}" length="${base_length}" />
</geometry>
<contact>
<ode>
<min_depth>0.001</min_depth>
</ode>
</contact>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
</collision>
<!-- 调用惯性矩阵函数 -->
<xacro:cylinder_inertial_matrix m="${base_mass}" r="${base_radius}" h="${base_length}" />
</link>
<!-- gezebo 有自己的颜色设置标签 -->
<gazebo reference="base_link">
<material>Gazebo/Yellow</material>
</gazebo>
<!-- 2-1.joint -->
<joint name="link2footprint" type="fixed">
<parent link="base_footprint"/>
<child link="base_link"/>
<!-- 关节z上的设置 = 车体高度/2 + 离地间距 -->
<origin xyz="0 0 ${base_joint_z} " rpy="0 0 0"/>
<axis xyz="0 0 0"/>
</joint>
<!-- 3.添加驱动轮 -->
<!--
形状: 圆柱
半径: 0.0325m
厚度: 0.015m
-->
<!-- 属性封装 -->
<xacro:property name="wheel_radius" value="0.0325" />
<xacro:property name="wheel_length" value="0.015" />
<xacro:property name="wheel_mass" value="0.1" />
<xacro:property name="PI" value="3.1415927" />
<!-- 注意: 结果是负数 -->
<xacro:property name="wheel_joint_z" value="${ (base_length / 2 + lidi -wheel_radius) * -1 }" />
<!-- 函数封装(方便调用) 底盘就一个不需要调用 而驱动论有两个要调用两次 -->
<!--
wheel_name: left 或 right
flag: 1 或 -1
-->
<xacro:macro name="wheel_func" params="wheel_name flag" >
<!-- 3-1.link -->
<link name="${wheel_name}_wheel">
<visual>
<geometry>
<cylinder radius="${wheel_radius}" length="${wheel_length}"/>
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="${PI / 2} 0.0 0.0"/>
<material name="wheel_color">
<color rgba="0 0 0 0.7"/>
</material>
</visual>
<collision>
<geometry>
<cylinder radius="${wheel_radius}" length="${wheel_length}"/>
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="${PI / 2} 0.0 0.0"/>
</collision>
<xacro:cylinder_inertial_matrix m="${wheel_mass}" r="${wheel_radius}" h="${wheel_length}" />
</link>
<gazebo reference="${wheel_name}_wheel">
<material>Gazebo/Red</material>
</gazebo>
<!-- 3-2.joint -->
<joint name="${wheel_name}2link" type="continuous">
<parent link="base_link"/>
<child link="${wheel_name}_wheel"/>
<!--
x 无偏移
y 车体半径
z z = 车体高度/2 + 离地间距 - 车轮半径 记得加负号是负值
-->
<origin xyz="0 ${0.1 * flag} ${wheel_joint_z} " rpy="0.0 0.0 0.0"/>
<axis xyz="0 1 0"/>
</joint>
</xacro:macro >
<!-- 调用宏 -->
<xacro:wheel_func wheel_name="left" flag="1" />
<xacro:wheel_func wheel_name="right" flag="-1" />
<!-- 4.添加万向轮 -->
<!--
形状: 球
半径:0.0075m
-->
<!-- 属性封装 -->
<xacro:property name="small_wheel" value="0.0075" />
<xacro:property name="small_wheel_mass" value="0.05" />
<xacro:property name="small_joint_z" value="${ (base_length / 2 + lidi - small_wheel) * -1 }" />
<xacro:macro name="small_wheel_func" params="small_wheel_name flag" >
<!-- 4-1.link -->
<link name="${small_wheel_name}_wheel">
<visual>
<geometry>
<sphere radius="${small_wheel}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<material name="wheel_color">
<color rgba="0 0 0 0.7"/>
</material>
</visual>
<collision>
<geometry>
<sphere radius="${small_wheel}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
</collision>
<xacro:sphere_inertial_matrix m="${small_wheel_mass}" r="${small_wheel}" />
</link>
<gazebo reference="${small_wheel_name}_wheel">
<material>Gazebo/Red</material>
</gazebo>
<!-- 4-2.joint -->
<joint name="${small_wheel_name}2link" type="continuous">
<parent link="base_link"/>
<child link="${small_wheel_name}_wheel"/>
<!--
x 相对底盘中心0.08
y 无偏移
z z = 车体高度/2 + 离地间距 - 万向车轮半径 记得加负号是负值
-->
<origin xyz="${0.08 * flag} 0 ${small_joint_z}" rpy="0.0 0.0 0.0"/>
<axis xyz="0 1 0"/>
</joint>
</xacro:macro >
<!-- 调用宏 -->
<xacro:small_wheel_func small_wheel_name="front" flag="1" />
<xacro:small_wheel_func small_wheel_name="back" flag="-1" />
</robot>
版权声明:本文为weixin_55937915原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。