1、在进行单目相机标定后,可以求得单个相机的内参数。对极几何是双目标定的基础,通过对极约束可求得基础矩阵,结合内参数求得本质矩阵,从而得到外参数。
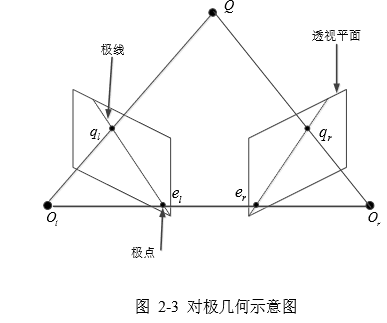
el ,er:极点
Ol,Or:左右相机坐标原点
ql,qr:Q在左右相机的投影点
qlel,qrer:左右图像对应的极线
基本矩阵的定义:给定一对图像,对于第一幅图像上的任一像点x,在第二幅图像中均存在一条与之对应的极线l‘(且该极线是qlOl在右图像的投影),而F就是x到l‘的映射。
对极约束:左图像上一极线上的点ql,其在右图像上的匹配点qr一定在对应的极线上。
求解F可分为两个步骤:
(1)把左图像上像点ql映射到右图像上设为qr
(2)连接qrer即为即为对应极线
根据单应矩阵的定义,可知存在一个二维单应矩阵Hπ使得qr=Hπql【注:因为qlqr都是三维齐次坐标,其自由度为2】
则对应极线为:l‘=er x ql=[er]x•ql=[er]xHπql 令F=[er]xHπ 则l‘=Fql
【对于l‘=er x ql的说明:er ql都是三维齐次坐标。如a=(1,1),设其齐次坐标是(1,1,1).
b=(2,3),b的齐次坐标是(2,3,1).则aΧb=(-1,1,0)即-x+y+0z=0 即y=x表示过a,b两点的直线】
对极约束的公式表示:

版权声明:本文为qq_37935909原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。