本文将,进入一个全新的领域——机器人仿真,ROS提供了机器人仿真环境,这意味着学习机器人系统并不一定需要实体机器人,大大降低了我们学习者的成本,本文将介绍如何在ROS中描述我们的机器人。
目录
前言
导出URDF文件
前言
URDF文件是一种标准的XML文件,用于描述机器人模型,主要为两部分:连杆link与关节joint,本文不会详细介绍如何编写URDF,而是借助ROS官方提供的sw2urdf插件将我们建模好的机器人直接转为URDF模型。
导出URDF
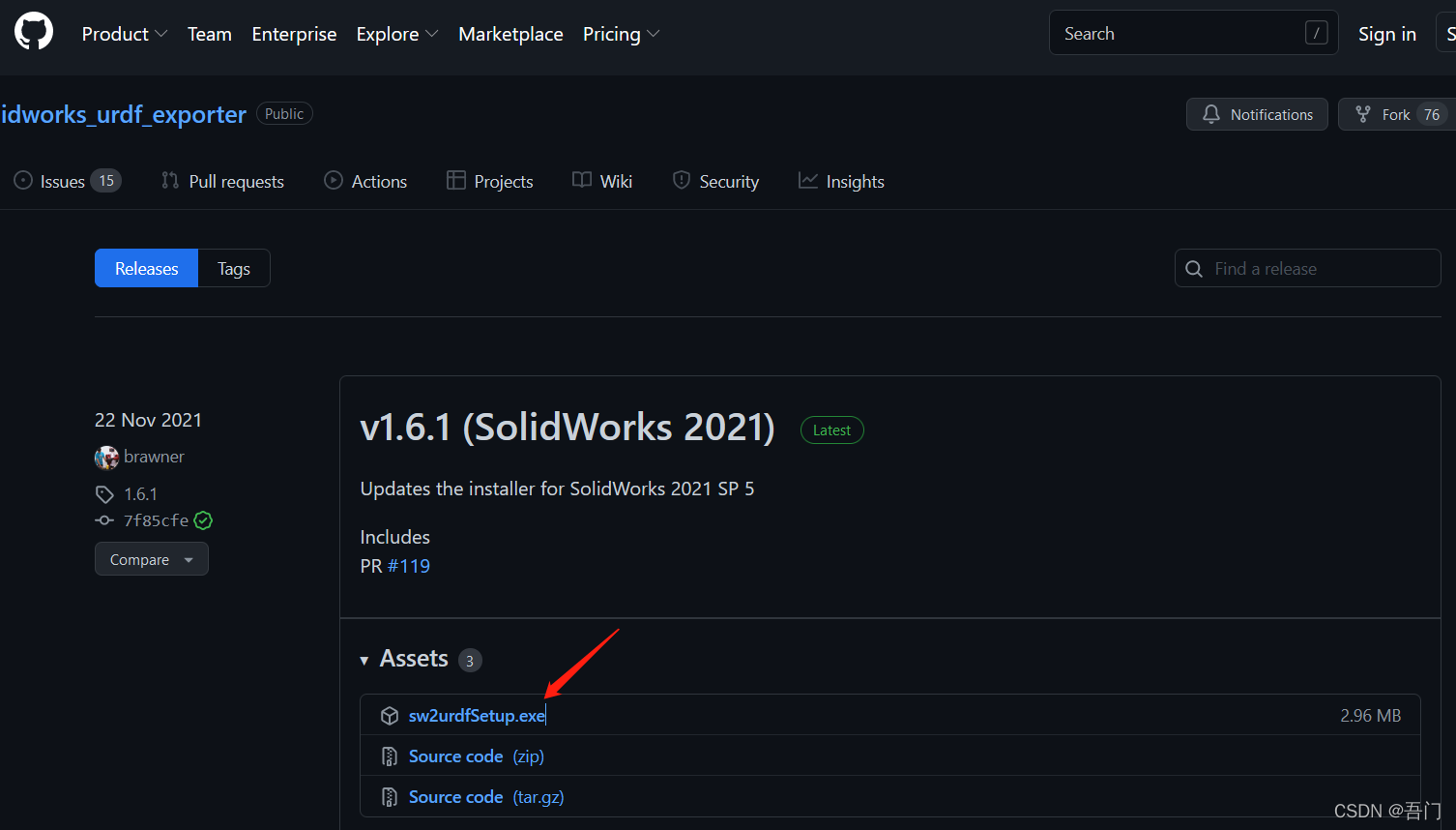
step1.安装sw2urdf插件
我们可以利用官方给出的sw2urdf插件将我们已经建好的模型轻松的转换成URDF文件。
step2.URDF事前准备
利用sw2urdf插件导出URDF文件需要注意几点:
1.可以将固定一起的零件合为同一零件降低工作量同时减少出错的概率;
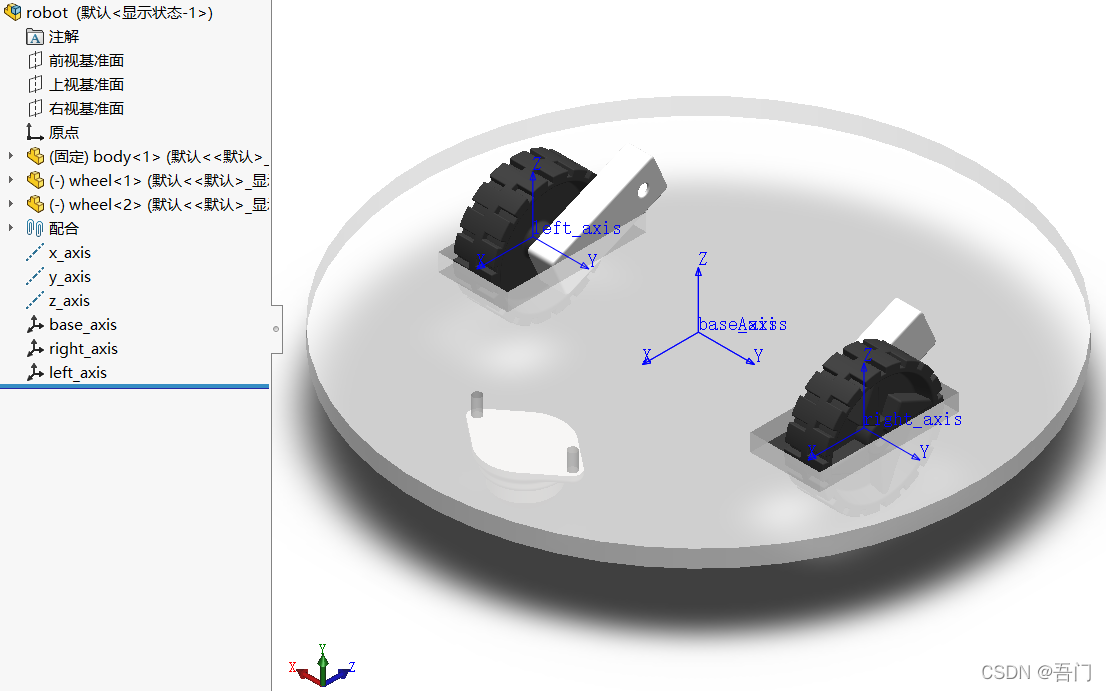
2.所有的在sw2urdf插件中的原点、坐标系与轴都在装配体中否则会出现散架现象;
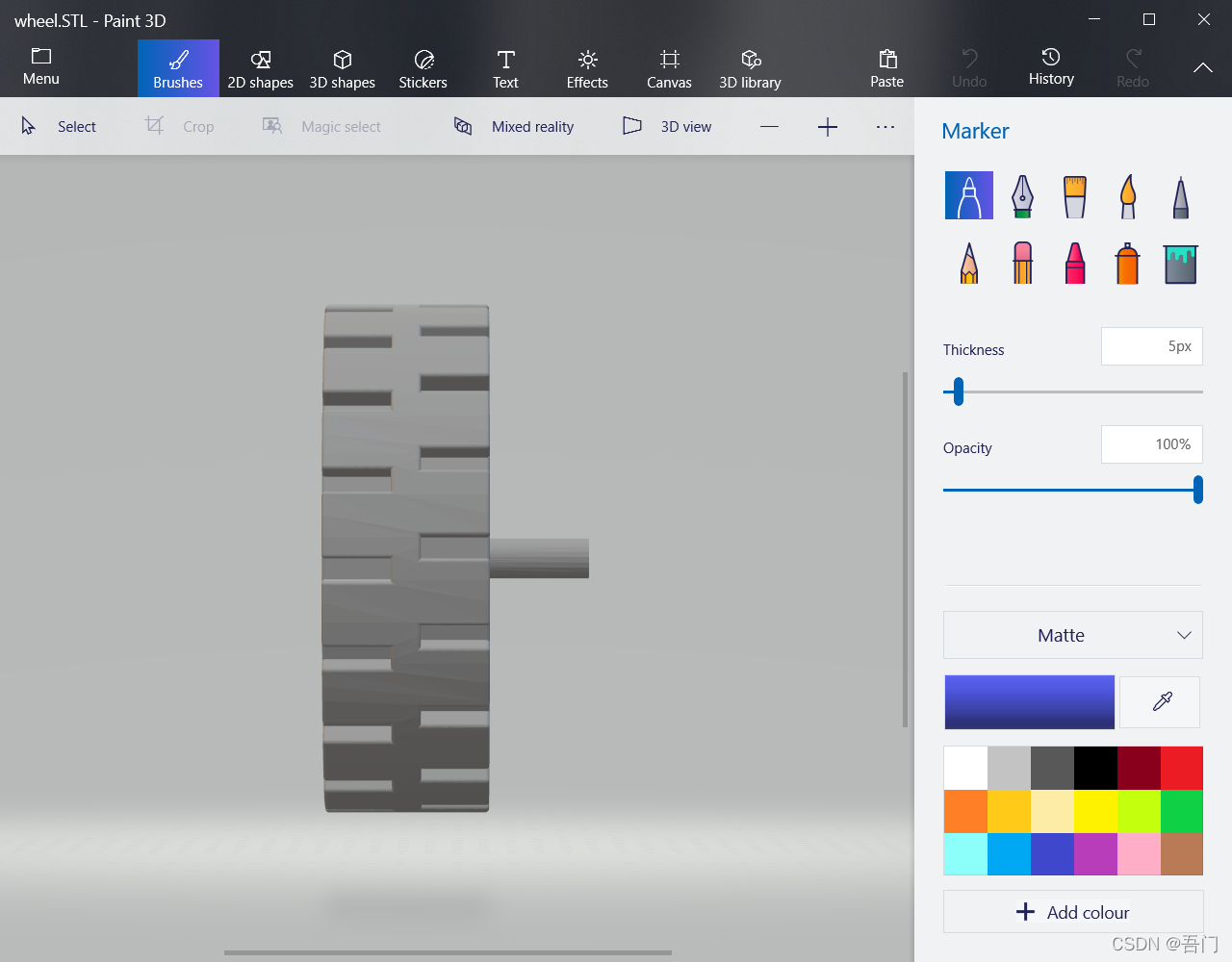
3.所有零件的材质选择纯净的材质不使用复杂材质如轮胎纹、豹纹等。
首先是第一点,本文将主动轮与旋转轴合为同一零件,其余不动的零件合为另一零件,具体如下:


其次是第二点,本文将所有的在sw2urdf插件中的原点、坐标系与轴都在装配体中,具体如下:
最后是第三点,URDF中mash标签中的STL文件实际上是不包含材质只包含形状的,如下所示:
只要注意好这三点即可完美导出正确的URDF文件。
step3.导出URDF
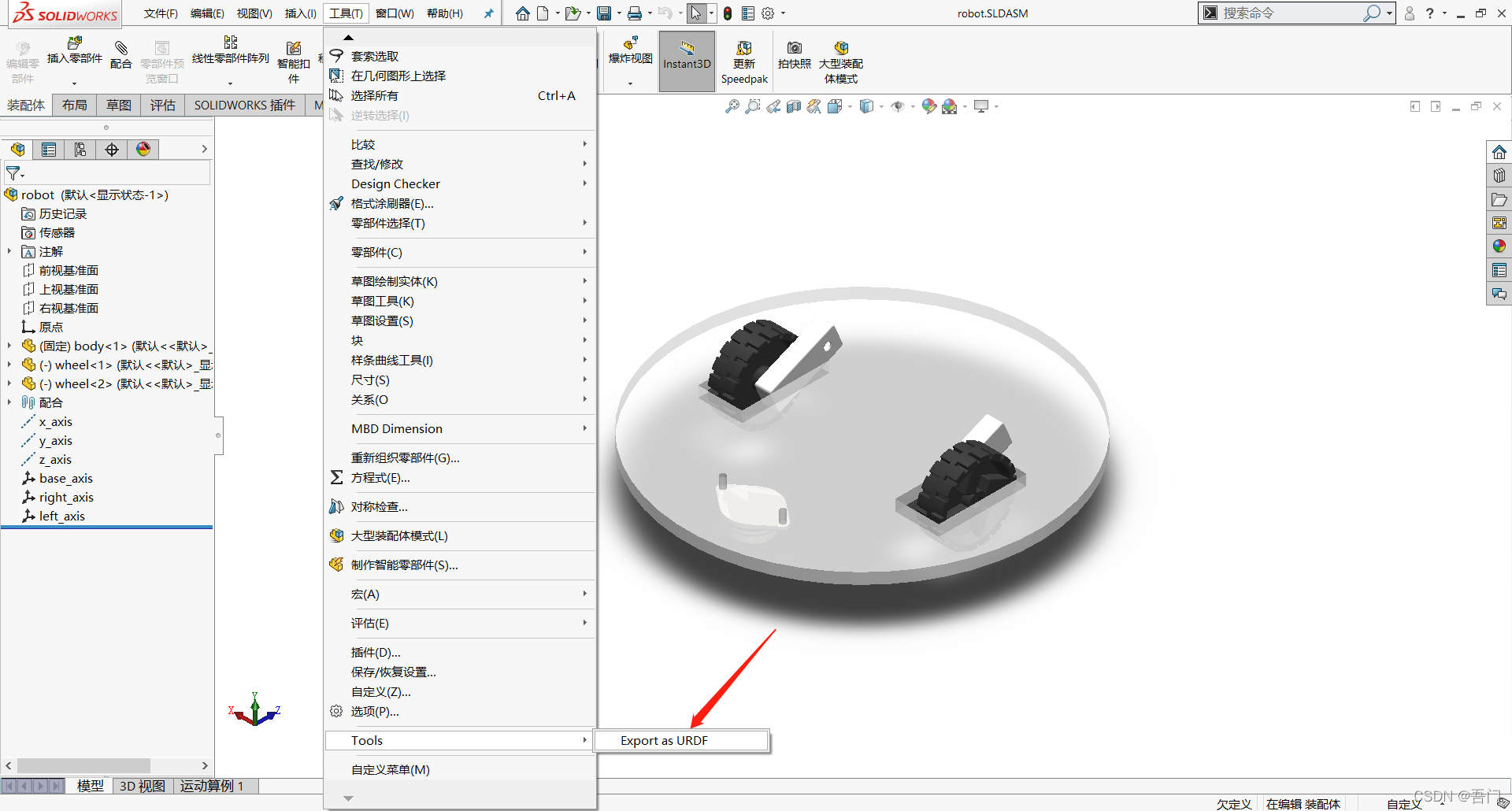
在工具-Tools中选择Export as URDF,如下所示:
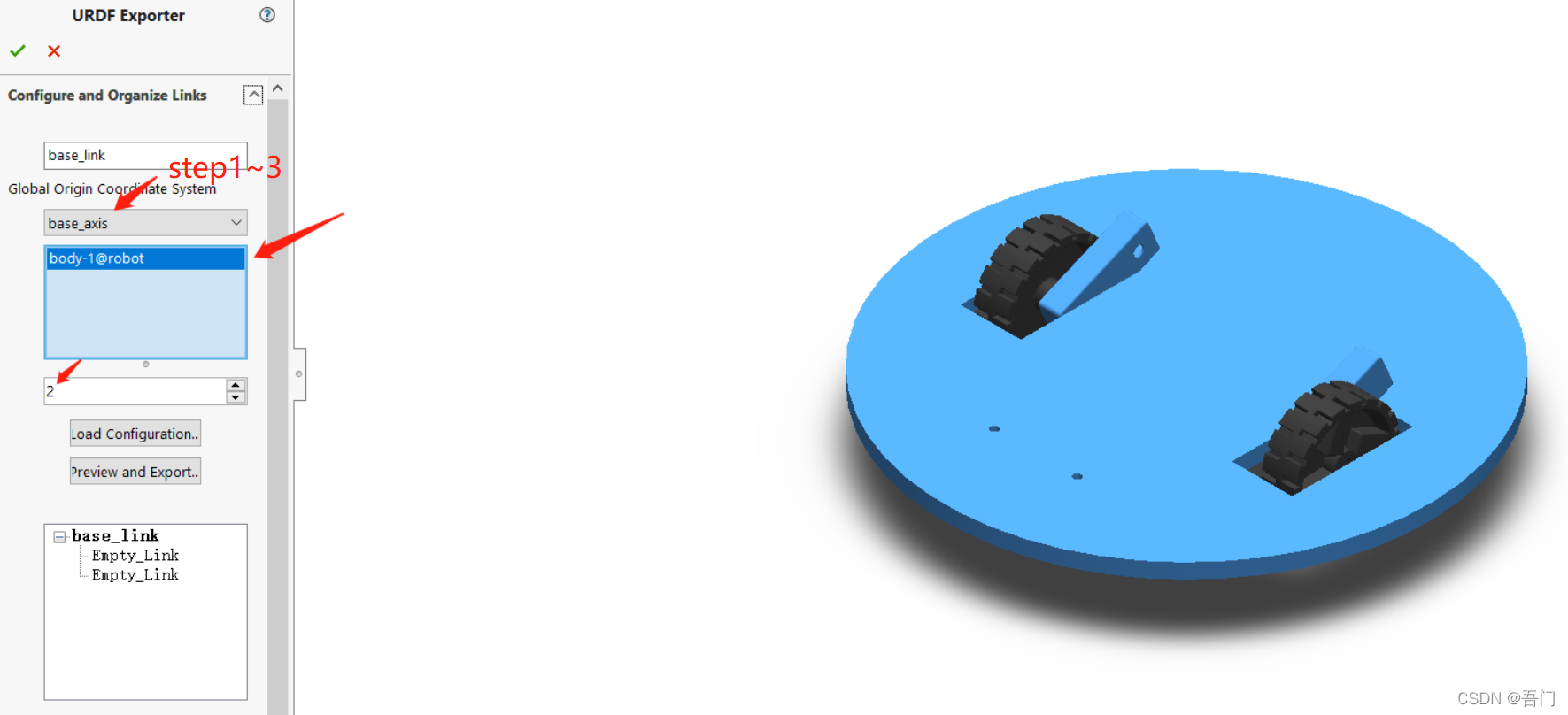
设置base_link,坐标系为base_axis,部件为body,joint数量为2,如下所示:
设置right_wheel,坐标系为right_axis,旋转轴为y_axis,类型为continous,部件选wheel:

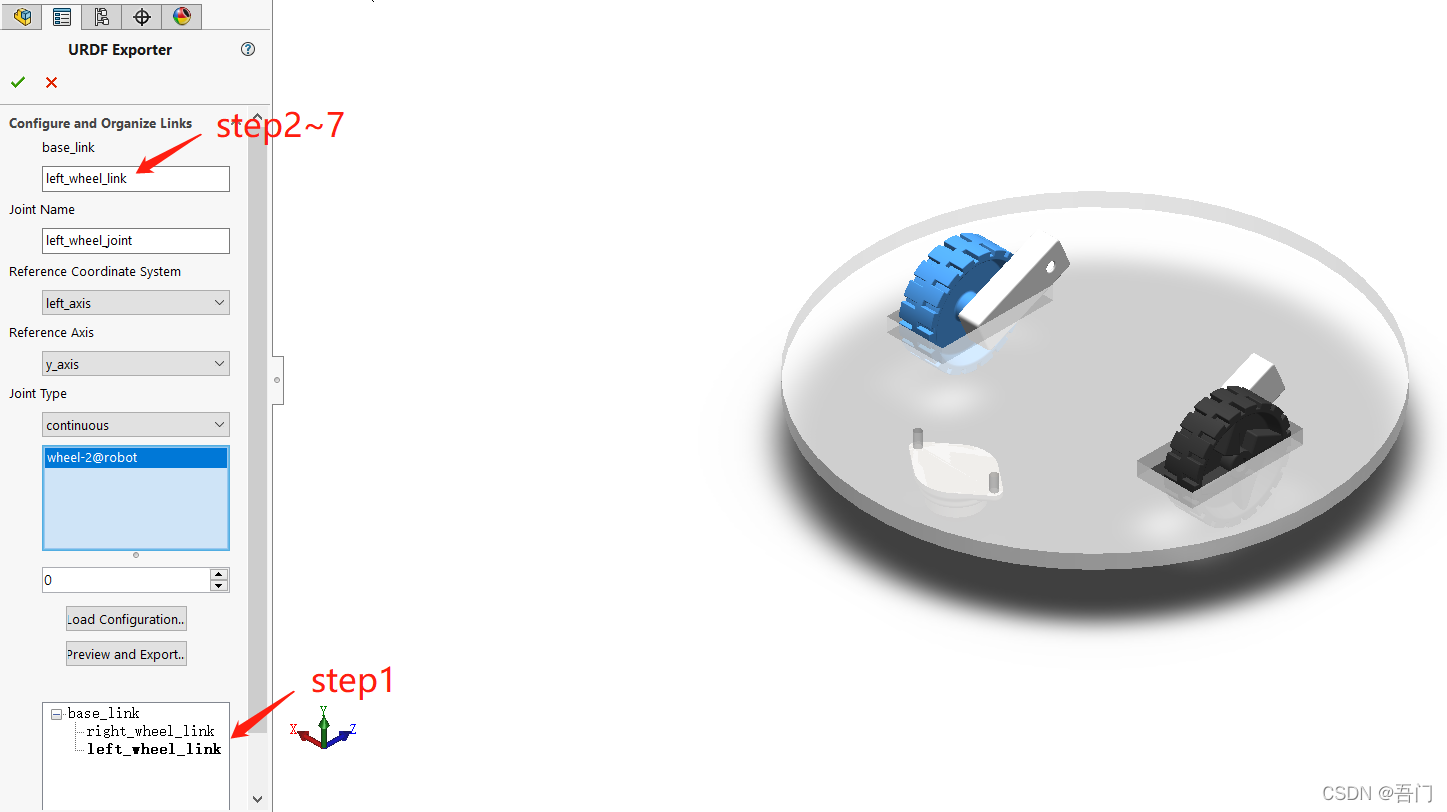
同理设置left_wheel,如下所示:
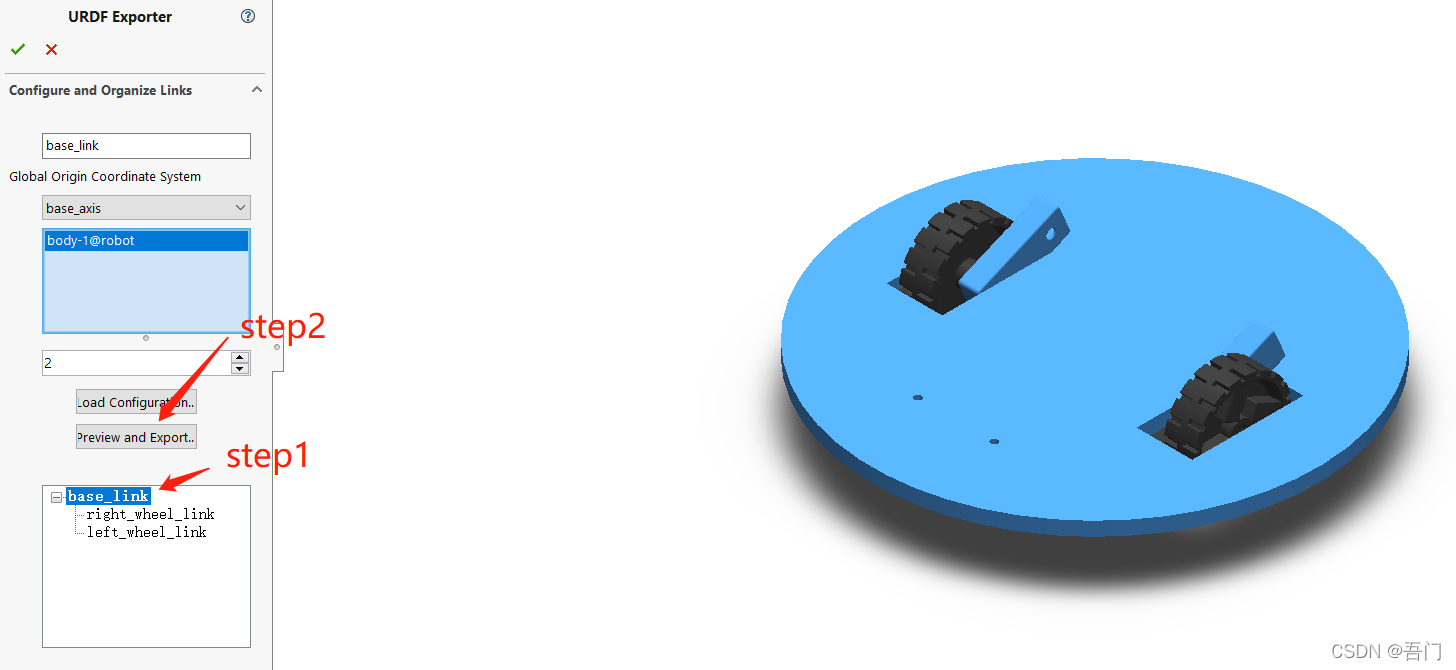
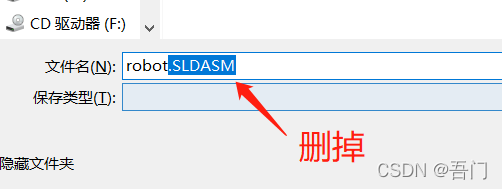
进行相关配置导出URDF命名为robot,如下所示:


这样我们就成功的导出了我们的包含URDF文件的robot功能包,当然可参考ROS Wiki的教程。
文章预告:ROS入门教程(五)—— RViz仿真