参考:https://blog.csdn.net/leonardohaig/article/details/82813738
文章目录
一、ROS是什么?
ROS是一个专门针对机器人软件开发设计的通信框架,源自美国斯坦福大学团队的一个开源项目,目前已有十年的发展历史,其开源以及对商用友好的版权协议使他很快就得到越来越多的关注与支持。
二、Ubuntu 18配置ROS环境步骤
1. 设置安装源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2. 设置keys
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3. 确保系统软件处于最新版
sudo apt-get update
4.安装
sudo apt-get install ros-melodic-desktop-full
5.初始化
sudo rosdep init
rosdep update
如果初始化失败,出现:sudo: rosdep: command not found
执行下面代码以后再重新初始化
sudo apt install rospack-tools
第二次安装时出现错误:

在这个问题上走了两天的弯路,搜索了很多的方法,五花八门,最终https://github.com/RocShi/rostaller使用这个有效。
vim安装方法如下:
打开终端输入:
sudo apt install vim
测试:打开终端输入:
vim a.txt
使用代码打开文件:输入“i”进入编辑模式,修改完后按“ESC”健或者“Ctrl+C”退出编辑模式,再输入“:”输入:“wq”保存修改内容。
6.环境配置
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
7.安装rosinstall
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
8.测试
roscore
出现一下情况则证明配置成功:
9. 小海龟示例
- 打开一个新的终端,输入:
roscore
- 打开一个新的终端,输入:
rosrun turtlesim turtlesim_node
出现小海龟。
- 打开一个新的终端,输入
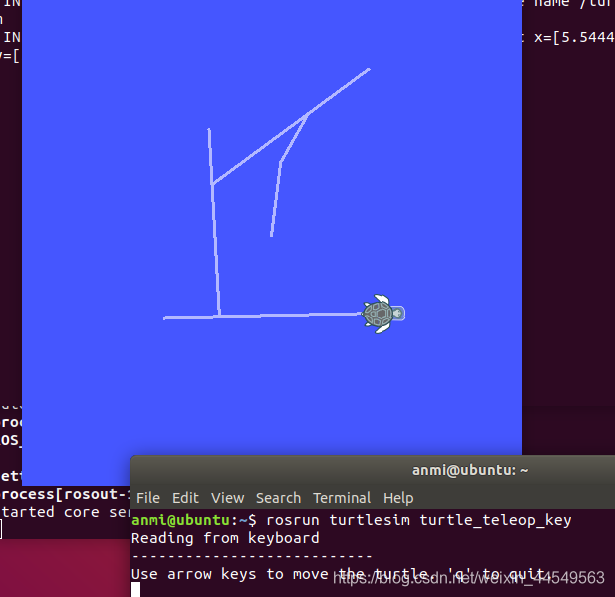
rosrun turtlesim turtle_teleop_key
在最后一个终端界面,使用上下键控制前进和后退,左右键控制方向,第二个终端打开的界面中的乌龟会随着操作运动,并绘制出轨迹。
版权声明:本文为weixin_44549563原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。