问题描述
利用sw_urdf_exporter插件可以方便快捷的导出urdf package,省去了用户自己编写urdf文件的过程。但是,由于该插件导出的link是.STL格式,因此每个连杆都不带纹理,即丢失了在solidworks中的颜色信息,这样模型文件在rviz中就显得很单调。
解决方案
ROS的URDF目前只支持两种格式的模型文件,STL与DAE。其中,.STL文件只记录了文件的三维坐标信息,没有纹理信息。DAE则是另一种xml格式的模型文件,可以包含文件的纹理等信息。所以我们可以将.STL文件替换成.DAE文件,让自己的机器人在rviz中携带漂亮的纹理信息。
- Step1:首先通过sw_urdf_exporter插件生成urdf package包;
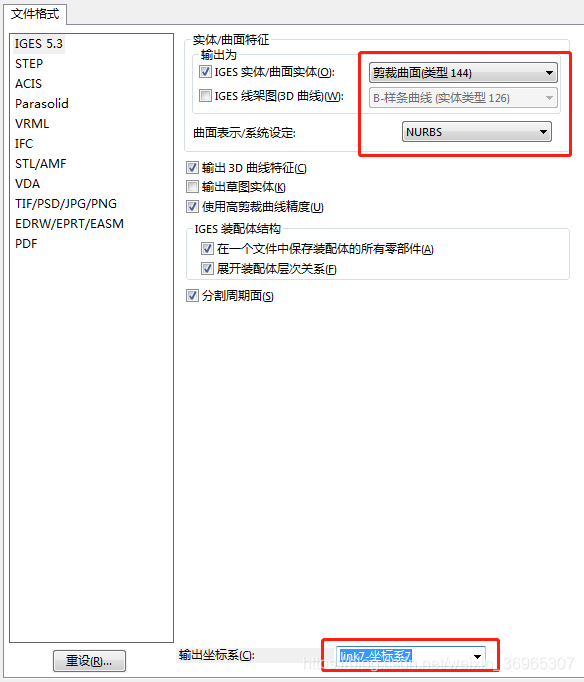
- Step2:在solidworks中将每个link保存成.IGES格式(注意单位设置成mm),具体保存选项如下图1所示,要特别注意输出坐标系的选择。
- Step3:安装3d max 2015,安装opencollada插件。在导入.IGES前,先设置3d max的单位信息,具体设置如下图2所示;
- Step4:导入每个link的.IGES模型,另存为OpenCOLLASA(*.DAE)格式,具体保存选项如下图3所示;


- Step5:将urdf package中【meshes】文件夹内的所有.STL文件替换为.DAE文件;
- Step6:修改urdf package中【urdf】文件夹内的.urdf文件,将mesh元素后缀改为.DAE。注意collision元素不需要修改,仍为.STL。
注意事项
- 在SolidWorks中将每个link另存为.IGES时,要注意每个link坐标系要与你利用sw_urdf_exporter插件进行urdf package时的坐标系保持一致;
- 利用sw_urdf_exporter插件导出urdf package时最好自己建立每个link的坐标系,如果是机械臂的话根据DH建系法则进行建系就可以;
- 注意base_link的z轴要竖直向上,不然在rviz中模型是倒着放的。
SimLab Plugins for solidworks
使用上述方法生成的文件后缀名为.DAE,这种文件在rviz中可以正常显示,但是在gazebo中无法加载,gazebo会出现卡死的情况。
还有一种方法可以生成带纹理的模型,就是使用SimLab Plugins插件直接将solidworks模型生成.dae文件。笔者亲测通过这种方法生成的模型可以同时在rviz和gazebo中显示,但该插件没有坐标系对齐功能, 只能跟默认原点坐标系对齐,导出时要特别注意,否则你的模型跟DH坐标系不一致就会出现各连杆之间有一段距离(这个距离就是默认坐标系跟连杆坐标系之间的距离),好像没有装配的感觉。
下载资源
- opencollada:OpenCOLLADA Tools · KhronosGroup/OpenCOLLADA Wiki · GitHub(安装2015版本)
- sw_urdf_exporter:sw_urdf_exporter – ROS Wiki
- SimLab Plugins for solidworks:Solidworks_Collada_Exporter
版权声明:本文为weixin_36965307原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。