Gmapping的搭建运行
1.下载gmapping
#终端下载gmapping 源码:
sudo apt install ros-noetic-slam-gmapping
2.跑Gmapping
#终端启动ROS
roscore
#开启新终端,设置使用的仿真时间
rosparam set use_sim_time true
#新建终端,运行slam_gmapping节点,它将在base_scan主题上接收激光扫描数据
rosrun gmapping slam_gmapping scan:=base_scan
#在数据集目录下新建终端,把激光数据发送给slam_gmapping节点
rosbag play --clock *.bag

3. rqt工具的使用
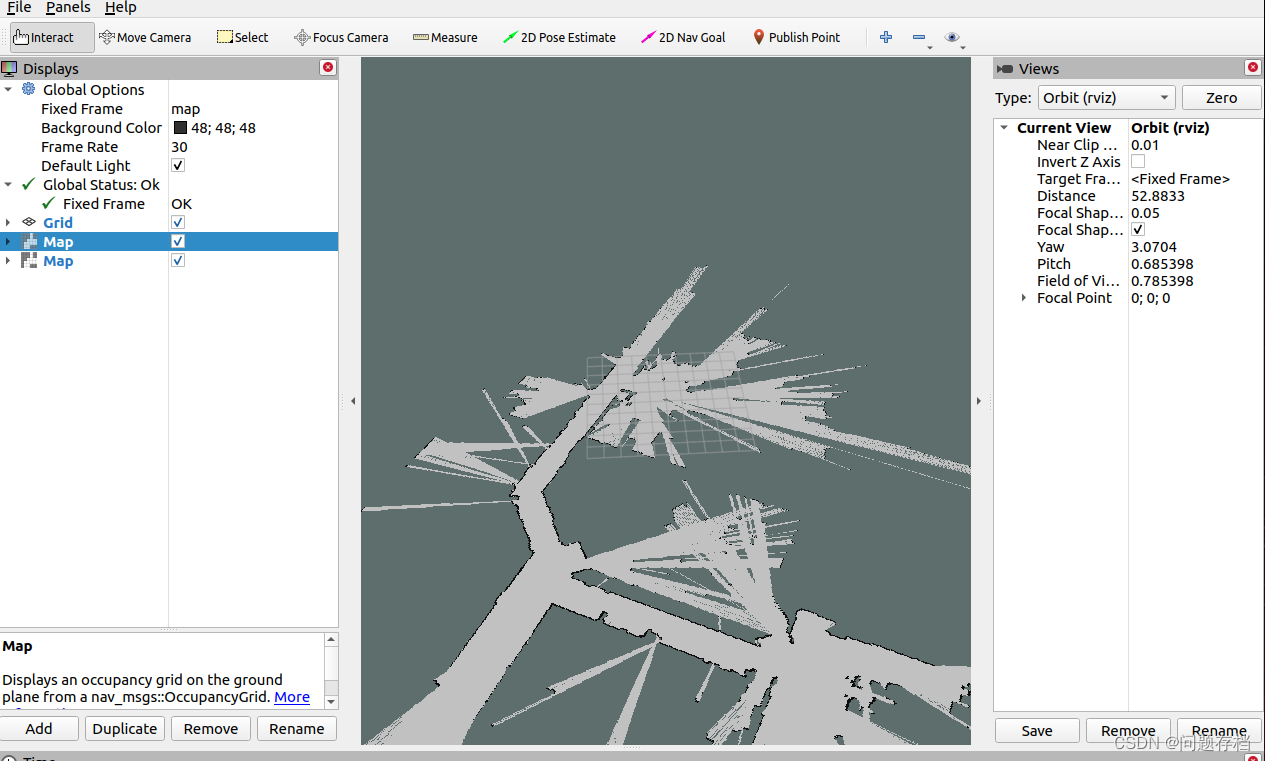
rviz
rviz中点击左下角的add弹出对话框,在上方选择By topic,在内部选择map,即可看到创建的2D地图
可以通过rqt_graph看到节点和话题之间的关系,新建终端打开rqt_graph:
rqt_graph
版权声明:本文为chaganggang原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。