假期闲着无事,不如搞点小玩具玩玩,今天进行环境搭建的是INNFOS公司GLUON 2L6-4L3型号的仿生机器人,多说无益,开始正文!

开始前,请准备好相关的硬件设施(这里就不一一介绍了,厂家发的是成套的)
———————————————————正文分割线———————————————————
一.widows系统下虚拟机linux环境的搭建
1.首先你需要选择一款喜欢的虚拟机,这里我借鉴同平台大神的文章跟着安装的,链接如下
VMware虚拟机下载与安装教程(详细的很,一看就懂)_神仙阿姨的博客-CSDN博客_虚拟机vmware
安装完成后,我们打开VNware,页面如下(许可密匙网上搜索)
我们点击“创建新的虚拟机”,进入安装向导页面
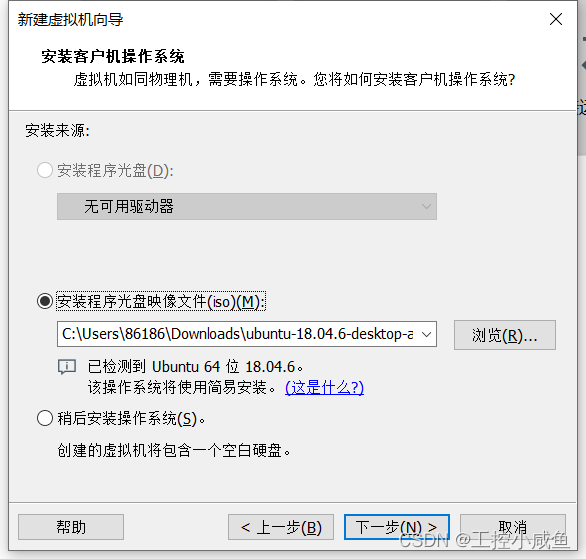
注意:需要根据机器人支持的版本下载对应iso映像,这里支持的是linux-x86-64-ubuntu18.04版本(下载链接放下面了)。
接着选择你喜欢的名称和密码,然后可以选择重命名你的虚拟机名称(剩下的跟着向导走就行,如果你有其他想法,那当我没说)


到这一步我们的虚拟机就安装完毕了。
2.接下来我们进入虚拟机页面,开始连接机器人进行环境搭建
点击屏幕左下角的“九宫格”,选择“terminal”终端


新安装的虚拟机可能没有git,先输入此命令安装git

安装完成后,输入代码下载机械臂软件
$ git clone https://github.com/mintasca/innfos-gluon-controller.git通过git下载后进入到主目录(目录不对的可以自己拉取文件夹)
$ cd innfos-gluon-controller/ 
接下来我们安装通讯所需的安装包
输入指令:sudo apt install cmake
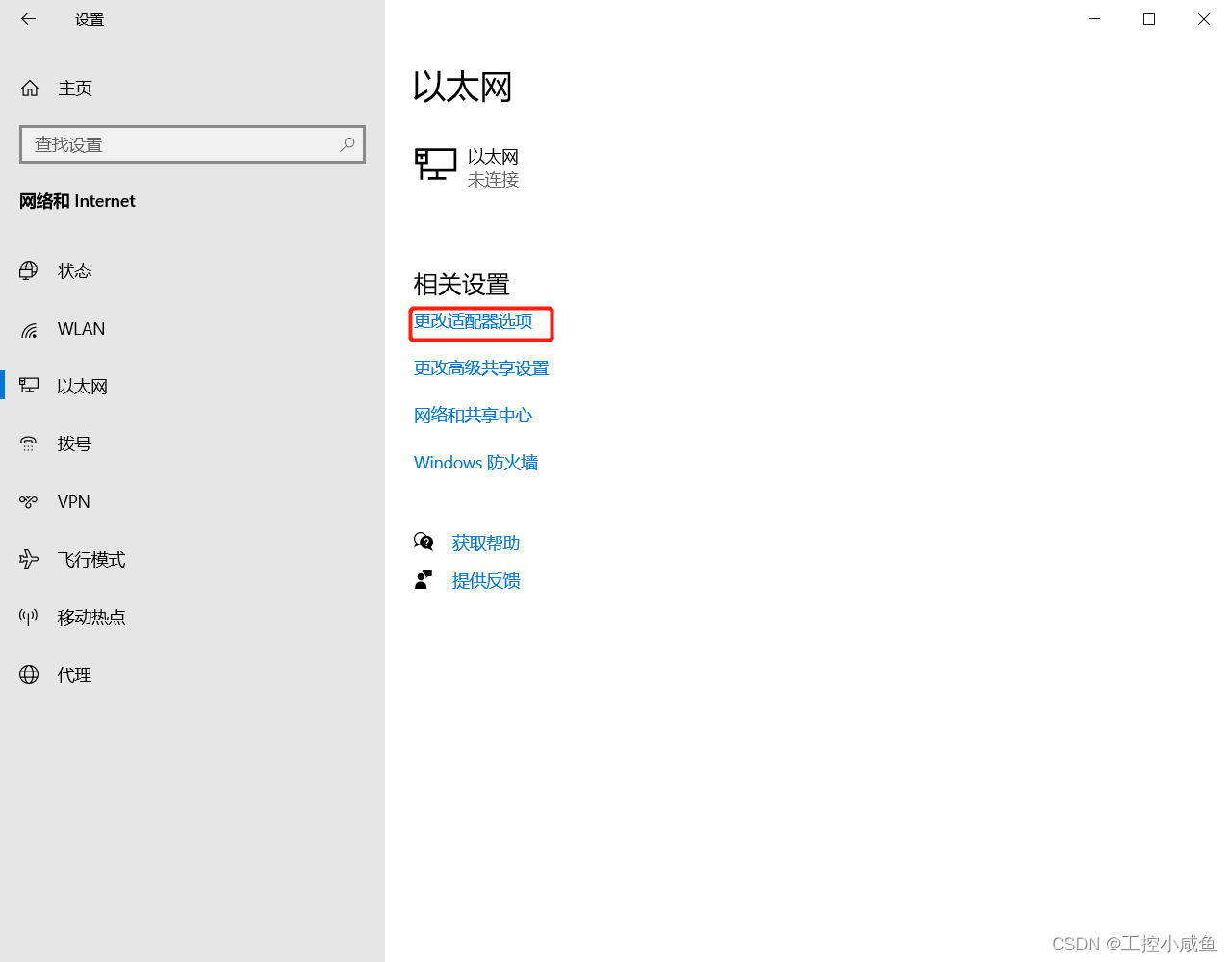
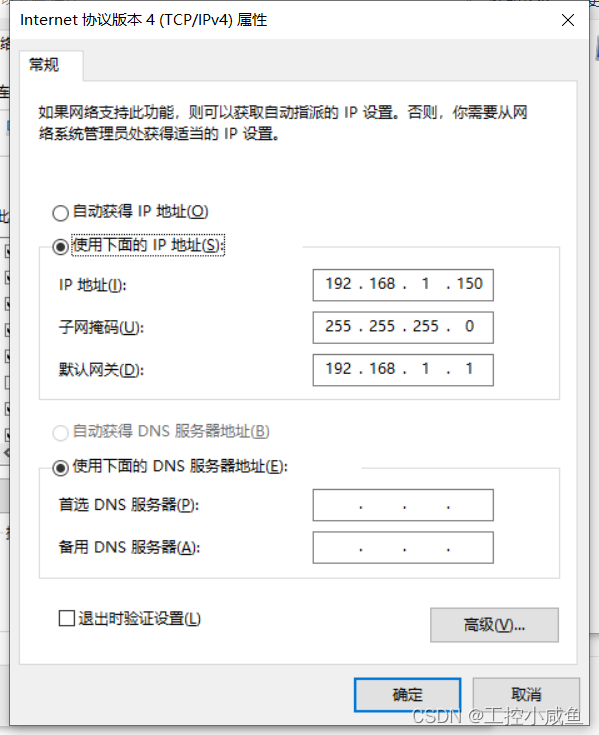
 安装完成后,我们更改一下电脑适配器中以太网IPv4端口的IP地址(可与我设置的IP段一致,IP地址可从192.168.1.100-200中任意选取)
安装完成后,我们更改一下电脑适配器中以太网IPv4端口的IP地址(可与我设置的IP段一致,IP地址可从192.168.1.100-200中任意选取)


IP设置完成后,我们返回虚拟机页面,输入ifconfig,查看当前IP

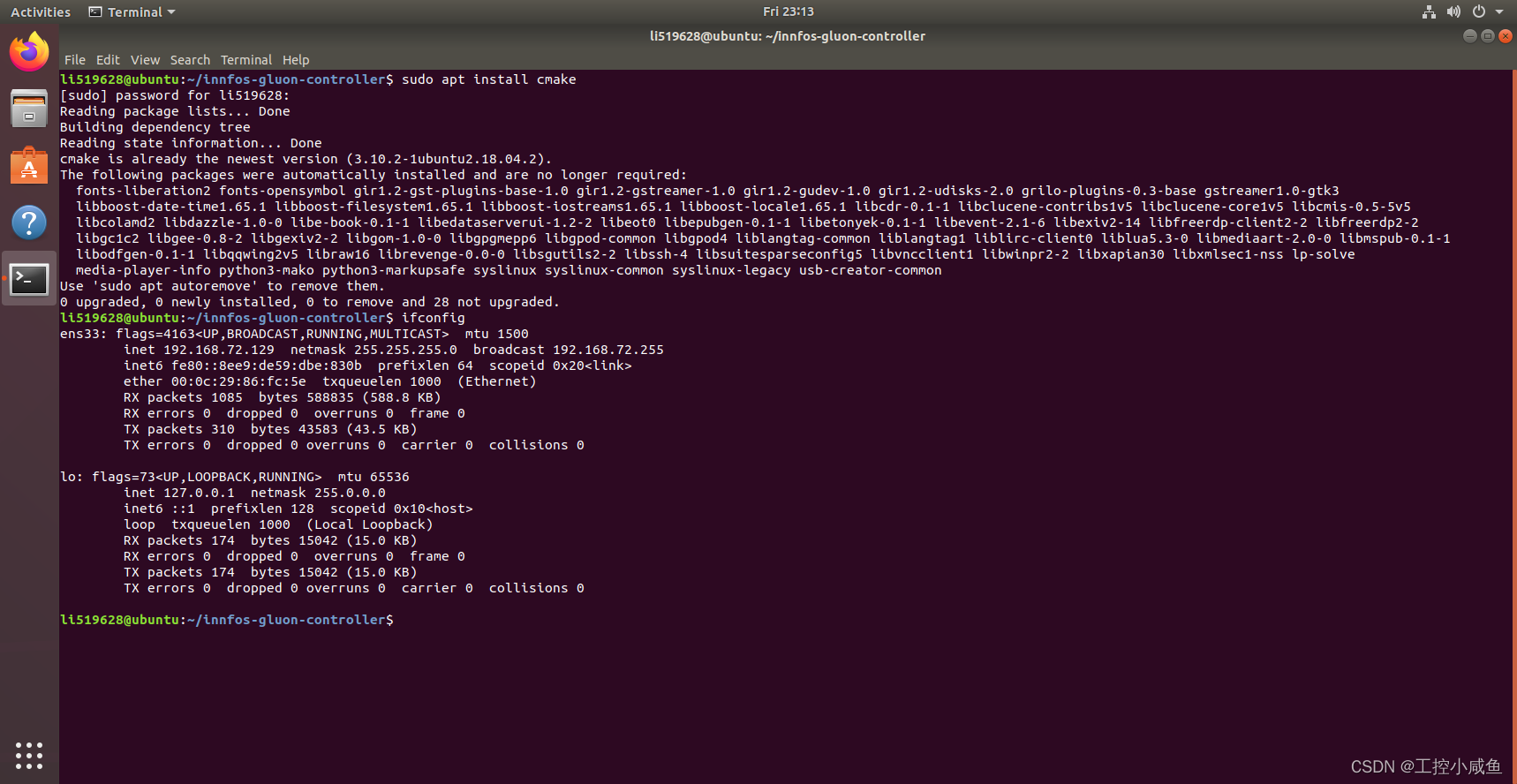
电脑端更改后,一般来说都是可以直接通讯上的,虚拟机如果显示IP不一致,无法连接通讯就重启一下。
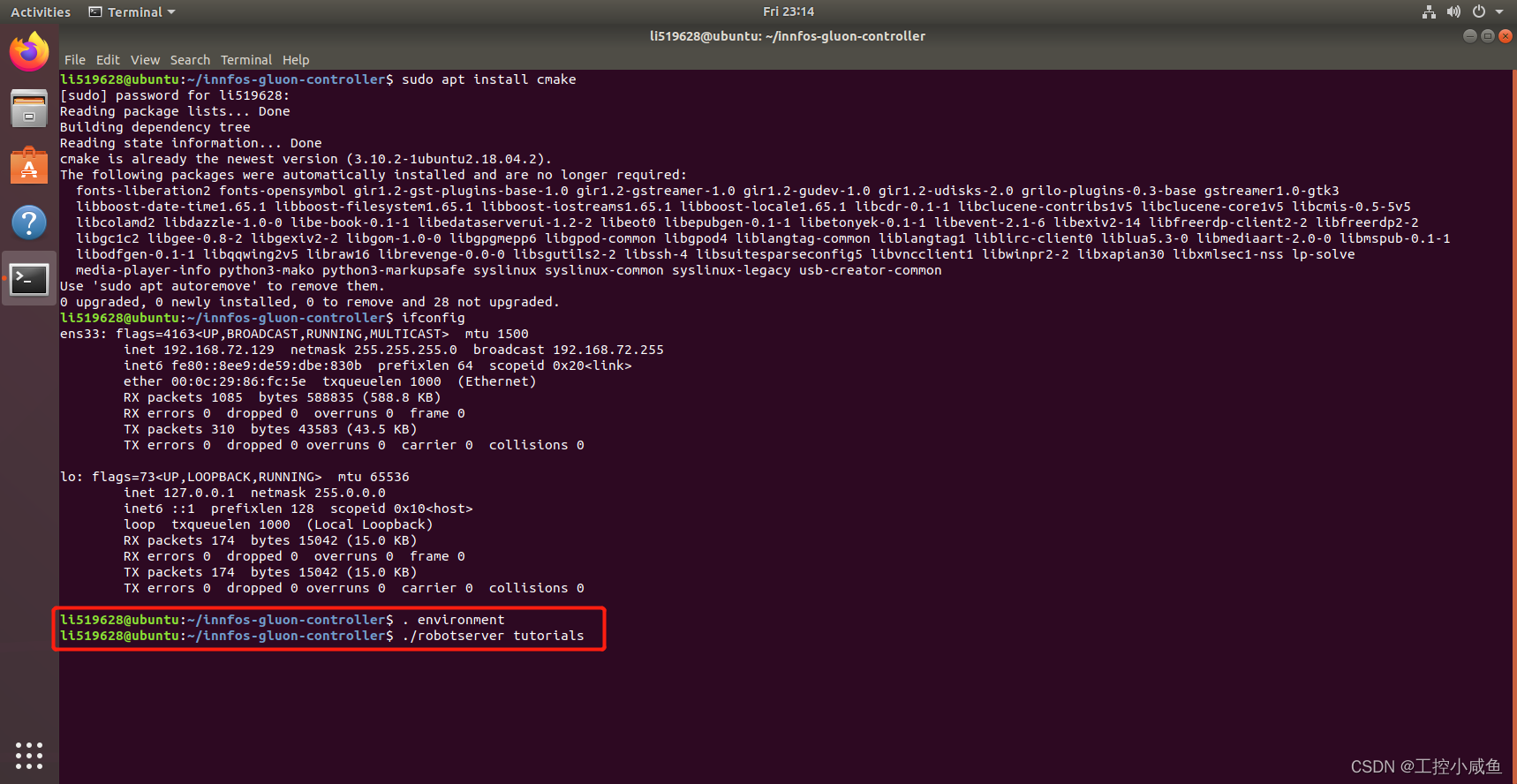
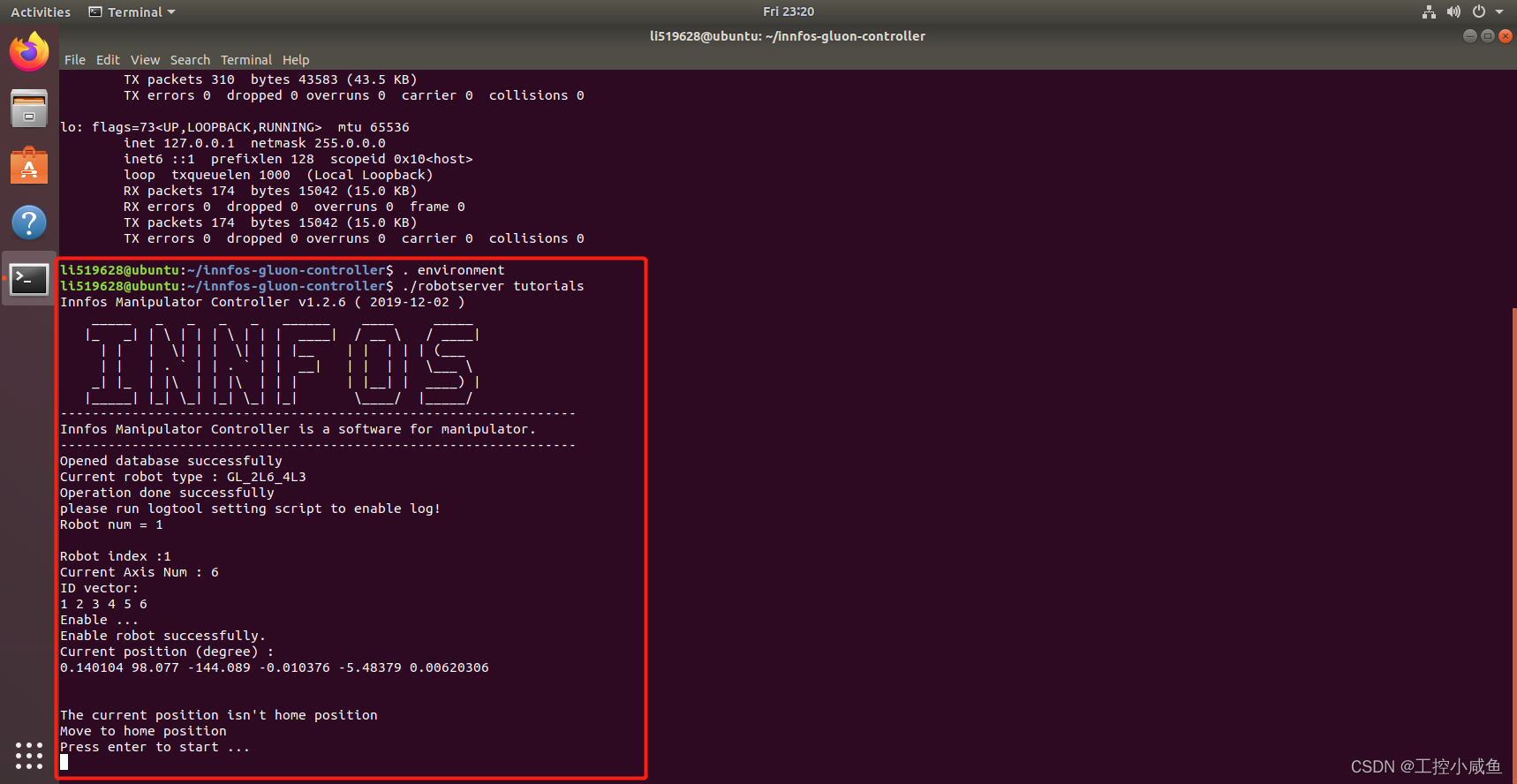
3.IP通讯完成后输入 . environment (.后面有一个空格),确认环境
接着输入 ./robotserver calibrate :标定机器人原点
./robotserver tutorials :运行向导模式中的四个已有程序
./robotserver mode0 :关机
./robotserver mode1 :拉动示教点位(连续)
./robotserver mode2 :运行mode1记录的点位数据
./robotserver mode3 :单点记录
./robotserver mode4 :运行单点记录集合成的连续动作
至此就可以动起来了!
二.树莓派Linux系统环境的搭建
因为虚拟机环境搭建同上述殊途同归,只有机器人软件版本和IP更改不太相同,这里其他部分不再过多赘述。(直接上链接)
1.树莓派版本:
适用于Raspberry Pi 3 Model B 和 Raspberry Pi 3 Model B+
直接执行以下命令,下载机器人软件
$ git clone https://github.com/mintasca/innfos-gluon-controller-raspi.git2.树莓派设置静态IP地址(有线网络)_啥也不会的小廖的博客-CSDN博客_树莓派设置静态ip