汽车的转向过程就是阿克曼转向。其也是移动机器人的一种运动模式之一。
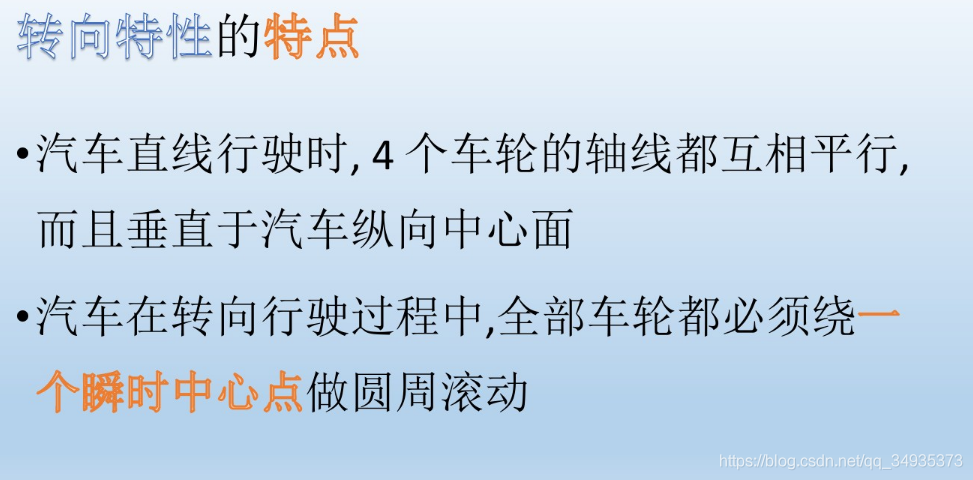
阿克曼基本原理:汽车在行驶过程中(直线和转弯时候),每个车轮的运动估计必须符合他的自然运动轨迹,从而保证轮胎与地面始终处于纯滚动。
具有特性:
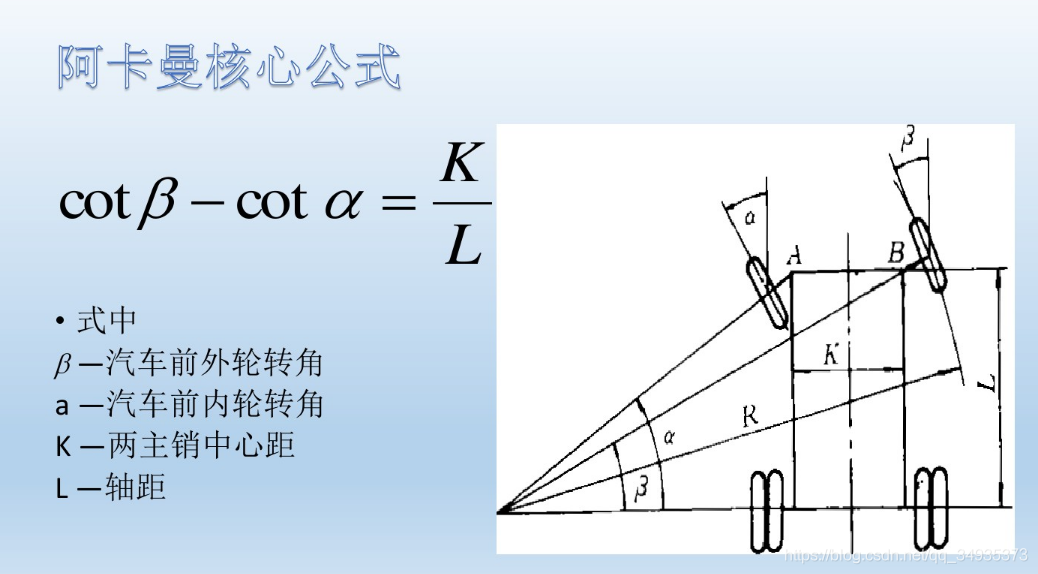
公式:
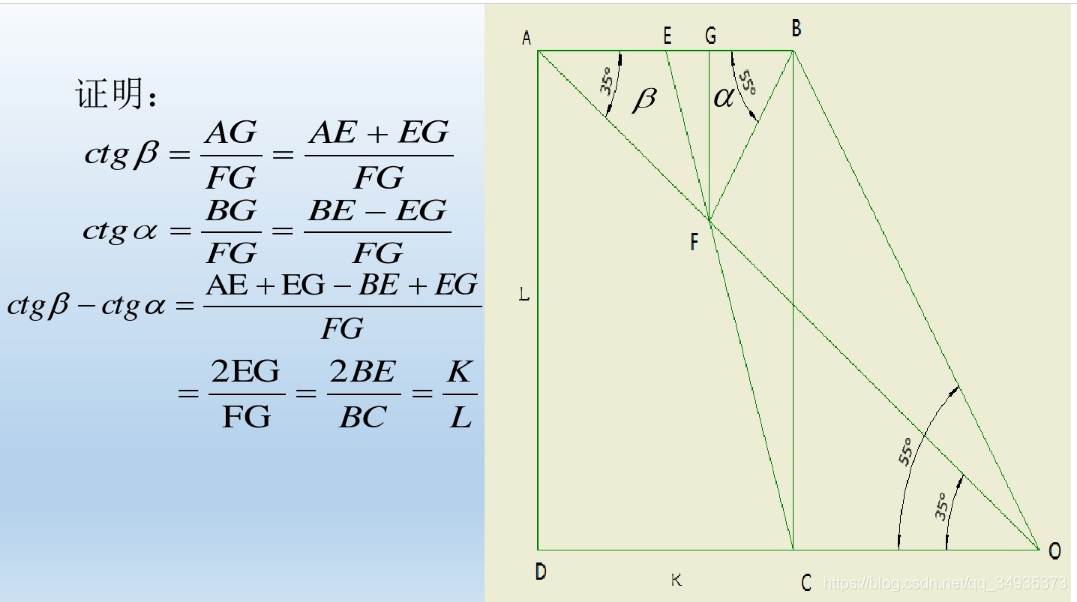
证明:
深入的就不写了。包括:基于阿克曼转向的机构设计,以及考虑轮胎侧偏对阿克曼转向角进行调整修正。
有一篇论文可以参考:卡车考虑轮胎侧偏影响的内外轮转角关系试验研究
版权声明:本文为qq_34935373原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。