最近在琢磨别的事情,Gazebo探索上面进展不大,但也有一些收获,秉承慢慢写的佛系态度记录一下:
- pigot四足项目的步态改进,前行换成了摆线步态,加入了斜向步态
- Gazebo-IMU(惯性测量单元)插件的用法
- 利用rqt_plot绘制数据验证步态改进的效果
步态改进
简单来说,就是将每一步的足端轨迹规划为一条摆线。摆线轨迹的两端方向垂直于地面,足端与地面在其它方向的冲击力更小,机器人行进更加稳定。
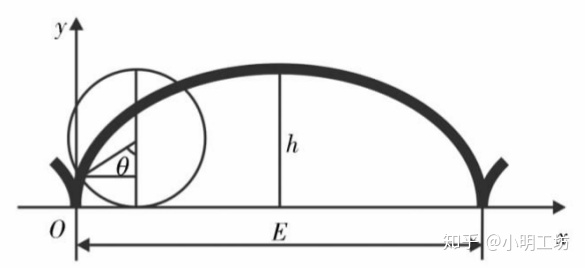
由于我们已经有了四足机器人足端逆解方法,因此规划摆线轨迹没有什么困难。轨迹代码见pig_control功能包的traj_data文件中的forward_gait()函数。详细的参考资料推荐一个:
基于力传感器的四足机器人多步态规划及初步维稳控制_百度学术xueshu.baidu.com
在该文的3.3节中讲到摆线步态以及优化方法。
惯性测量单元(IMU)插件
惯性测量单元是测量物体三轴姿态角(或角速率)以及加速度的装置,在机器人导航中有着很重要的应用[1]。
Gazebo中提供了IMU插件libgazebo_ros_imu_sensor.so,官方教程十分简单。这里介绍基本的使用步骤:
1. 在模型文件中建立一个link用以放置IMU插件
既可以添加一个单独的link代表IMU传感器,图方便也可以直接固连在已有的link中。在pigot中便直接使用机体连杆body_link放置IMU。
2. 在xacro文件中配置IMU
添加如下代码以配置IMU,一般只需修改<bodyName>的值为想要连接IMU的连杆名称即可。
<!-- IMU plugin for 'body_link' -->
对于大型工程,建议单独建立一个xacro文件以配置所有的插件(传感器、控制插件等),再在主文件中引用。pigot项目中的插件配置文件为pigot.gazebo。
3.建立一个订阅者用以接收IMU数据
上述两步完成以后,运行仿真模型时,topic列表中就会出现一个imu话题,不停地有imu消息发送到这个话题上。pigot项目中的话题为/pigot/imu,前缀/pigot来源于机器人运行在单独的命名空间中,在pigot_world.launch中进行设置,设置方式见我的这篇文章。
订阅者代码如下,网络上很容易找到c++的代码,这里用python来写:
#!/usr/bin/env python
需要注意的地方有:
消息类型Imu
from sensor_msgs.msg import Imu导入一种消息类型Imu,这是一种标准的传感器消息类型,官方文档sensor_msgs/Imu 消息类型中重要部分摘录如下:
geometry_msgs文档描述了Imu的消息结构,其中姿态(orientation)类型为四元数(geometry_msgs/Quaternion);角速度(angular_velocity)和线加速度(linear_acceleration)的类型为三维向量(geometry_msgs/Vector3)。
四元数(Quaternion)转欧拉角(Euler-Angles)
四元数是一种姿态的表达方式,与欧拉角相比,它规避了“万向节锁”的问题。
这篇文章讲解了四元数与欧拉角的相互转换
这个视频形象地介绍了万向节锁的问题
4. 利用rqt_plot绘制数据曲线
rqt_plot是ROS内置的一款用于绘图的可视化插件。它可以读取话题中发布的数据,将类型允许的数据绘制成为图像。在终端中运行以下节点可打开rqt_plot:
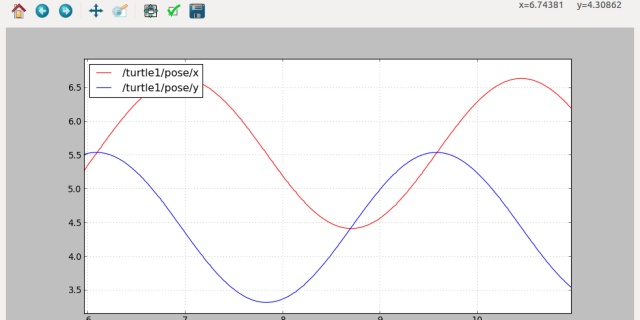
rosrun rqt_plot rqt_plot如果Imu插件启动成功,那么此时的话题列表中就应该有相应的话题了。在Topic栏中输入相应的话题即可进行绘图。注意,根据官方文档说明,绘图需要指定出数值所在的完整的地址,例如想要绘制加速度linear_acceleration,它是imu话题中消息的一个成员,那么应当指明的地址为:
/pigot/imu/linear_acceleration
rqt_plot 官方文档wiki.ros.org
利用rqt_plot验证步态改进的效果
在pigot项目中,改进前的前行步态只是简单指明了轨迹点后进行了线性插值,改进后采用了摆线步态。那么,步态的改进对于改善机器人前行的平稳性究竟有没有好处呢?可以通过rqt_plot采集机器人前行过程中的线性加速度予以验证。
在线性插值的步态下,采集线性加速度图像如下:

改用摆线步态后,采集线性加速度图像如下:
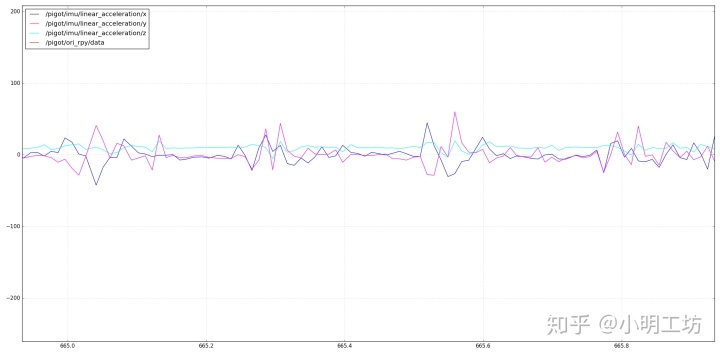
以上两次实验的步幅、步频、抬腿高度和落脚点均相同,可以看出,采用摆线步态时,落步时的冲击一定程度上减小了。这也说明了摆线步态更具有平稳性。
以上现象也可以直接从动作中观察到:
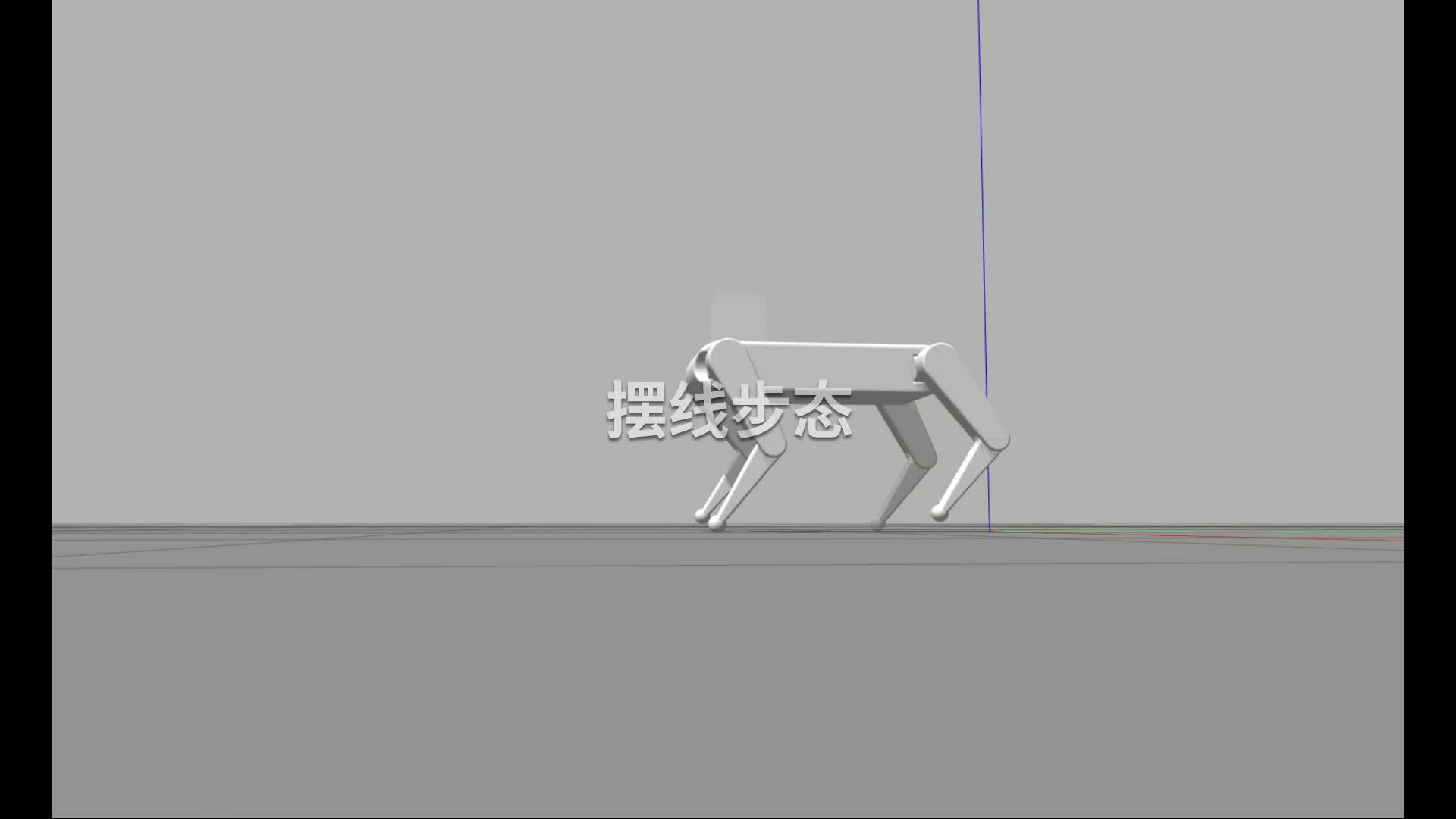
ROS四足机器人步态仿真对比https://www.zhihu.com/video/1101602829063634944
项目地址
pigotgithub.com

参考文献
[1] 百度百科 惯性测量单元
[2] 刘蕊. 基于力传感器的四足机器人多步态规划及初步维稳控制[D]. 南京航空航天大学.
[3] Gazebo-IMU 插件官方教程
[4] sensor_msgs/Imu 消息类型 官方文档
[5] 四元数与欧拉角的转换方法
[6] 万向节锁问题介绍视频
[7] rqt_plot 官方文档